Yarıiletken / TFT / Diyot Ölçümleri
Bu bölüm, Mikrofab ölçüm ve analiz yazılımının Yarıiletken / TFT / Diyot ailesindeki tüm ölçüm modüllerini ayrıntılı olarak anlatır. Her modül için amaç, ölçülen büyüklükler, eksiksiz parametre tabloları, hesaplanan metriklerin formülleri, üretilen grafik türleri, simülasyon (mock) davranışı ve çıktı dosyaları açıklanır. Modüller uygulamada Ölçüm çalışma alanında, sol gezinme ağacında üç kategori altında listelenir: Transistör, Diyot, Özdirenç ve Güvenilirlik / Termal-Harita.
Bu bölüm, bir yarıiletken cihazın (transistör, diyot, ince film) elektriksel olarak "nasıl davrandığını" ölçmenin yollarını anlatır. Cihaza kontrollü gerilim/akım uygular, tepkisini (akımını) okur ve bundan cihazın karakterini çıkarırız. Tıpkı bir doktorun hastaya farklı testler yapıp tek bir tabloya bakarak teşhis koyması gibi, her ölçüm modu cihazın farklı bir yönünü aydınlatır.
Fiziksel arka plan: Her ölçüm aslında cihazın bant yapısına, taşıyıcı yoğunluğuna ve tuzaklarına dolaylı bir penceredir: uyguladığımız gerilim cihazın içindeki elektrik alanını ve enerji bariyerlerini değiştirir, okuduğumuz akım da taşıyıcıların bu yeni duruma verdiği yanıttır. Bu yüzden farklı tarama biçimleri (DC, darbeli, sıcaklık taramalı) aynı cihazdan farklı fiziksel büyüklükleri ortaya çıkarır; bir ölçüm tek başına eksik kalırken modüllerin bütünü cihazın "tam tablosunu" verir.
- Neden yapilir: Ürettiğimiz/aldığımız cihazın çalışıp çalışmadığını, ne kadar iyi olduğunu ve neden bozulduğunu anlamak için.
- Ne ogretir / ne olcer: Eşik gerilimi, mobilite, açma/kapama oranı, doğrultma, direnç gibi cihazı tarif eden temel sayıları.
- Nerede kullanilir: Araştırma laboratuvarları, kalite kontrol, üretim hattı ve arıza analizi.
Ortak Kavramlar ve Paylaşılan Parametreler
Tüm ölçüm modülleri ortak bir altyapıyı paylaşır (app/measurement/sweep_engine.py, runner.py, base.py). Bu altyapı aşağıdaki davranışları her modüle kazandırır:
- Tarama motoru ve dağıtım (dispatch):
SweepEngine, seçili moda göre ilgili runner sınıfını çağırır;MeasurementRunnersonucu kaydeder ve(noktalar, özet, dosya_yolları)döndürür. - Çökme-güvenli ara kayıt: Her ölçüm noktası, ölçüm sürerken önce geçici bir
*_partial.csvdosyasına yazılır. Ölçüm başarıyla biterse bu geçici dosya silinir; hata veya çökme olursa diskte bırakılır (veri kaybı olmaz). - Güvenli durum (safe shutdown): Her ölçüm — başarı, hata veya iptal — sonunda SMU çıkışları kapatılır (
output_all_off) ve gerekli yerlerde röle açılır. Hata/iptal durumunda biaslar güvenli değere (0 V / çıkış OFF) alınır. - Compliance (akım/gerilim sınırı) koruması: Bir ölçüm noktasında cihaz compliance'a ulaşırsa ölçüm güvenlik için durdurulur ve kaç/kaç noktada durduğu bilgisiyle bir uyarı üretilir.
- Tarama yönü (hysteresis):
Forward(yalnız ileri),Reverse(yalnız geri) veyaDual(ileri + geri; histerezis). Dual'da ileri ve geri yön ayrı segmentler olarak etiketlenir; histerezis metrikleri yalnız Dual'da hesaplanır. - Donanım hata kuyruğu: SCPI/TSP işlemlerinden sonra cihazın hata kuyruğu güvenle okunur; hatalar yutulmaz, anlamlı şekilde yüzeye çıkarılır.
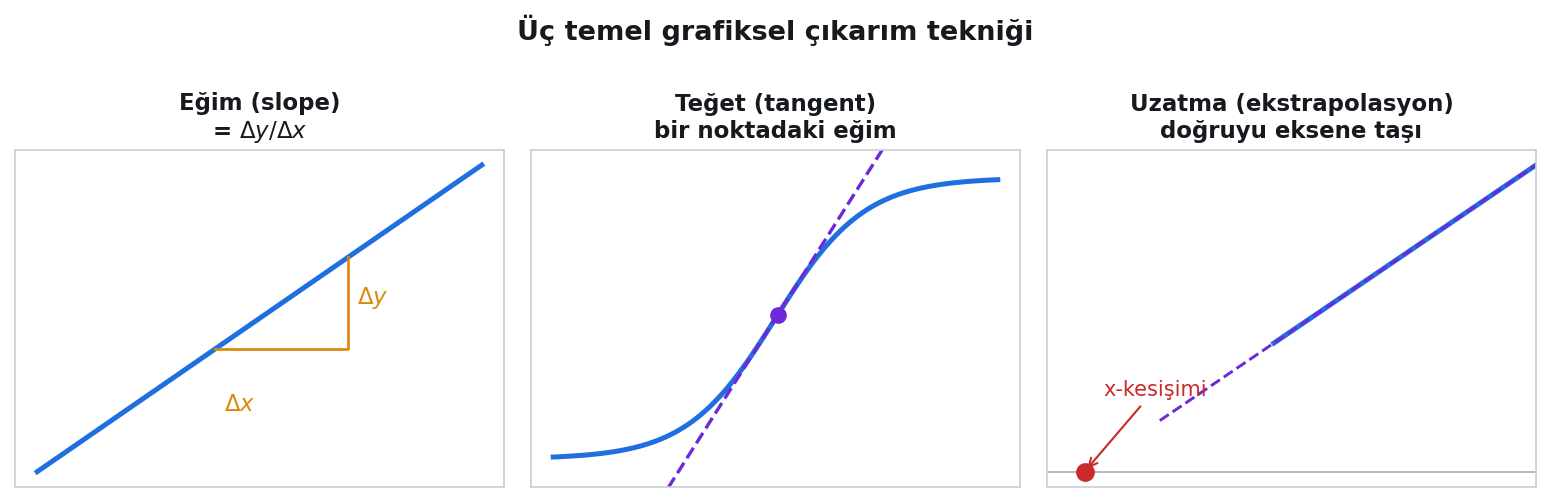
Bu bölümdeki neredeyse tüm parametreler ölçüm grafiğinden üç temel işlemle okunur: bir doğrunun eğimi (Δy/Δx), bir noktadaki teğet (o noktadaki anlık eğim) ve doğruyu bir eksene taşıyan uzatma (ekstrapolasyon). Çoğu durumda önce uygun bir dönüşüm (ör. log I_d, √I_d, ln I, 1/C², log–log) uygulanır ki ilgili bölge düz bir doğruya dönüşsün.
- Adım: ilgilenilen fiziksel bölge seçilir (lineer, doyum, alt-eşik, üstel kol …) ve gerekiyorsa eksen dönüştürülür.
- Adım: bu bölgeye bir doğru/teğet oturtulur ve eğim Δy/Δx olarak alınır.
- Sonuç: gerekiyorsa doğru uzatma (ekstrapolasyon) ile bir eksene taşınıp kesişim okunur; eğim ve kesişim ilgili formülle parametreye çevrilir.
Ortak SMU parametreleri (tüm modüllerde)
Aşağıdaki temel parametreler (BaseSweepParameters) hemen her modülde bulunur ve Ayarlar → Merkezi Varsayılanlar'dan tek noktadan ön-değer alabilir.
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
drain_current_compliance | A | Savak (drain) akım sınırı | 1e-4 |
gate_current_compliance | A | Kapı (gate) akım sınırı | 1e-6 |
voltage_limit | V | Gerilim sınırı (akım kaynağı modunda gerilim compliance) | 20.0 |
power_limit | W | Güç sınırı | 2.0 |
nplc | — | Entegrasyon süresi (Number of Power Line Cycles); yüksek = düşük gürültü, yavaş | 1.0 |
settling_time_s | s | Kademe/aşama değişiminden sonra yerleşme beklemesi | 0.05 |
measurement_delay_s | s | Her nokta için ölçüm öncesi bekleme | 0.02 |
averages | — | Nokta başına ortalama alınan okuma sayısı | 1 |
sweep_direction | — | Forward / Reverse / Dual | Forward |
log_scale | — | Canlı grafiği logaritmik göster | False |
enable_autorange | — | Cihaz otomatik aralık (autorange) tercihini aç | True |
voltage_limit ve compliance değerleri, güvenlik limitleri (max_abs_voltage, max_current_compliance) ile her ölçüm başında doğrulanır; limit aşılırsa ölçüm hiç başlamaz.Geometri parametreleri (mobilite/eşik için)
TFT/FET modüllerinde mobilite (µFE / µ_sat) ve doyum-eşiği hesabı opsiyonel geometri girdileri gerektirir. Girilmezse ilgili metrik atlanır (0 = girilmedi).
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
w_um | µm | Kanal genişliği (W) | 0.0 |
l_um | µm | Kanal uzunluğu (L) | 0.0 |
cox_nf_cm2 | nF/cm² | Kapı yalıtkan kapasitansı (Cox) | 0.0 |
Birim dönüşümleri formüllerde otomatiktir: Cox_F = cox_nf_cm2 × 1e-9 (F/cm²), W/L boyutsuzdur; sonuç doğrudan cm²/Vs olarak çıkar.
Çıktı dosyaları (tüm modüller)
Her ölçüm kaydedilince ham veri CSV (her satır bir MeasurementPoint: zaman damgası, mod, Vds/Vgs set+ölçülen, Ids, Igs, compliance, geçen süre) ve özet (hesaplanan metrikler) üretilir. Dosya temel adı bağlamdan türetilir (ör. TFT1_TRANSFER_YYYYMMDD_HHMMSS), isteğe bağlı ön-ek/son-ek eklenebilir (ör. IGZO_TFT1_TRANSFER_..._taze). Özet ayrıca isteğe bağlı ölçüm veritabanına da kaydedilir.
A. Transistör / FET / TFT Modülleri
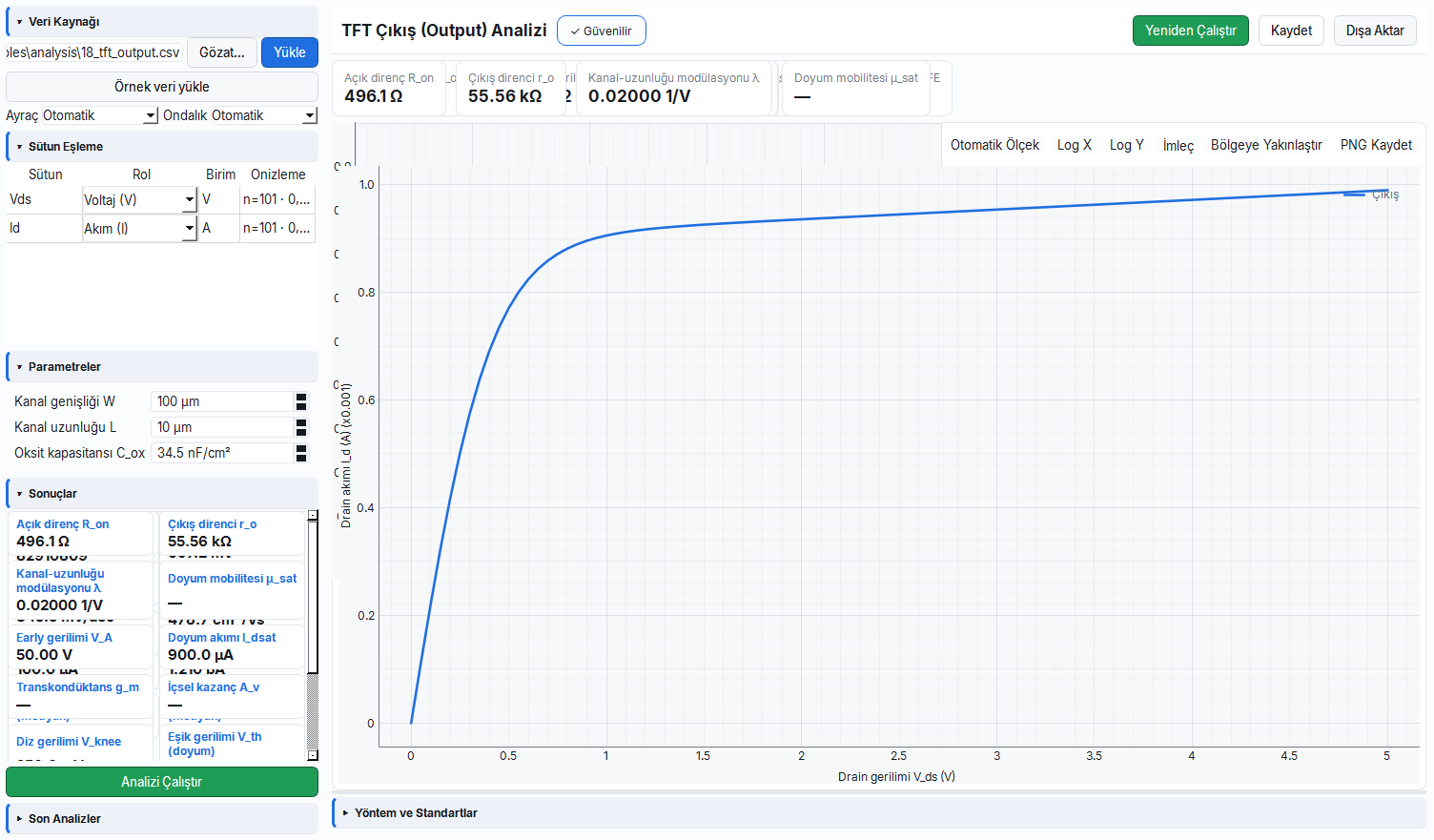
A.1 Çıkış Karakteristiği — Vds–Vgs (Output / Id–Vd)
Transistörü bir musluğa benzetin: kapı gerilimi (V_GS) musluğun ne kadar açık olduğunu, savak gerilimi (V_DS) ise borudaki basıncı belirler. Bu ölçüm, musluğu farklı açıklıklara sabitleyip basıncı (V_DS) yavaşça artırırken akan akımı (I_DS) izler. Elde edilen eğri ailesi, transistörün bir anahtar veya yükselteç olarak ne kadar güç taşıyabildiğini ve ne kadar kazanç verebildiğini özetler. Her musluk açıklığı için ayrı bir "basınç-akış" eğrisi çıkar; eğriler ne kadar yüksek ve düzgünse cihaz o kadar güçlüdür.
Fiziksel arka plan: Düşük V_DS'de kanal baştan sona iletken bir direnç gibi davranır; bu yüzden I_DS, V_DS ile yaklaşık doğrusal artar (lineer/triyot bölge). V_DS, V_GS−V_th değerini aştığında kanal savak ucunda "tıkanır" (pinch-off): fazladan gerilim artık akımı artırmak yerine tükenmiş bölgenin üzerine düşer ve eğri yatıklaşır (doyum bölgesi). Doyumdaki hafif yukarı eğim kanal-boyu modülasyonudur (λ); daha yüksek V_GS eğrileri kanalda daha çok taşıyıcı olduğu için daha yukarıda oturur. "Grafiğe bakınca" gördüğünüz keskin başlangıç + düz plato, sağlıklı bir transistörün imzasıdır.
- Neden yapilir: Transistörün anahtar/yükselteç olarak ne kadar akım taşıyabildiğini, hangi V_DS'te doyuma girdiğini ve güç/kazanç sınırlarını görmek için.
- Ne ogretir / ne olcer: R_on = lineer bölgedeki açık-durum direnci (düşük = az iletim kaybı); r_o = doyumdaki çıkış direnci (yüksek = ideal akım kaynağına yakın, yüksek kazanç); λ = kanal-boyu modülasyonu, doyum eğiminin sıfırdan sapması (küçük = daha düz/ideal); knee = lineerden doyuma geçilen diz gerilimi; g_m = geçiş iletkenliği (kapının akımı ne kadar etkili sürdüğü); A_v = g_m·r_o = intrinsik (içsel) gerilim kazancı.
- Tipik degerler ve yorumu: knee genelde V_GS−V_th mertebesindedir; iyi bir cihazda r_o ≫ R_on (oran yüzlerce–binler) olur ve doyum platosu belirgindir; A_v on'lar–yüzler arası iyi analog kazançtır; λ ne kadar küçükse (≪1 1/V) çıkış o kadar idealdir.
- Sik hata / dikkat: V_DS aralığını çok kısa tutup hiç doyuma girmemek (r_o ve λ çıkmaz); compliance'a çarpıp eğrinin tepesini kırpmak (doyum akımı yanlış okunur); diz gerilimini gözle değil ikinci türevin (|d²I/dV²|) tepesinden bulmak gerektiğini unutmak.
- Nerede kullanilir: Güç anahtarı ve analog devre tasarımında cihaz seçimi/doğrulaması; süreç doğrulama ve kalite kontrol.
Modül: measure.iv · Gezinme: Çıkış — Vds–Vgs
Amaç: Kademeli her sabit V_GS değeri için savak gerilimini (V_DS) tarayarak transistörün çıkış (output) eğri ailesini ölçer. Lineer ve doyum bölgelerini ortaya çıkarır.
Ne ölçer: Her (V_GS, V_DS) noktasında savak akımı I_DS ve kapı sızıntısı I_GS. V_GS bir parametredir (kapı kademesi), V_DS taranan eksendir. Dual modda histerezis yalnız taranan V_DS ekseninde uygulanır; V_GS tek yön kademelenir.
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
vds_start / vds_stop / vds_step | V | Savak taraması başlangıç/bitiş/adım | 0.0 / 5.0 / 0.5 |
vgs_start / vgs_stop / vgs_step | V | Kapı kademesi başlangıç/bitiş/adım | 0.0 / 5.0 / 1.0 |
w_um / l_um / cox_nf_cm2 | µm / µm / nF/cm² | Geometri (µ_sat/Vth_sat için, ops.) | 0.0 |
| Ortak SMU parametreleri | — | NPLC, compliance, settling, averages vb. | (yukarıdaki tablo) |
Hesaplanan metrikler (iv_analysis.py; her V_GS eğrisi için + başlık değerleri):
| Metrik | Formül / Yöntem | Birim |
|---|---|---|
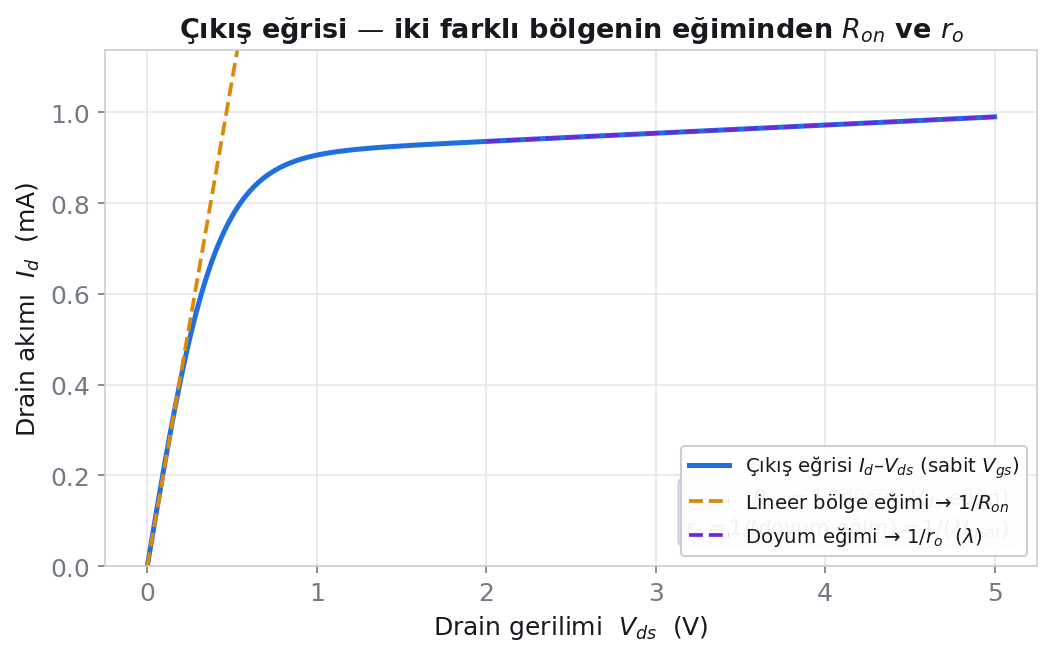
| R_on (açık direnç) | Düşük V_DS lineer bölgede (|V| ≤ min(0.5, 0.05·V_max)) I_DS–V_DS fit eğiminin tersi: R_on = |1/eğim| | Ω |
| r_o (çıkış direnci) | Doyum bölgesinde (|V| ≥ 0.6·V_max) r_o = |1/eğim| | Ω |
| λ (kanal-boyu modülasyonu) | Doyum doğrusu V_DS=0'a geri-ekstrapole edilip λ = |eğim/kesim|; Early gerilimi V_A = 1/λ | 1/V |
| knee (diz gerilimi) | |d²I_DS/dV_DS²| maksimumunun olduğu V_DS | V |
| g_m / A_v | g_m = ΔI_dsat/ΔV_GS (komşu eğriler); intrinsik kazanç A_v = g_m·r_o | S / — |
| µ_sat / Vth_sat | √I_dsat–V_GS çapraz-eğri lineer fitten: µ_sat = eğim²·2L/(W·Cox), Vth_sat = −kesim/eğim | cm²/Vs · V |
Başlık (headline) R_on/r_o/λ değerleri en yüksek |V_GS| eğrisinden alınır. Kapalı/zayıf-açık cihazda (V_GS ≤ Vth_sat veya I_dsat < %0.1·I_max) A_v fiziksel anlamsız olduğundan N/A bırakılır.
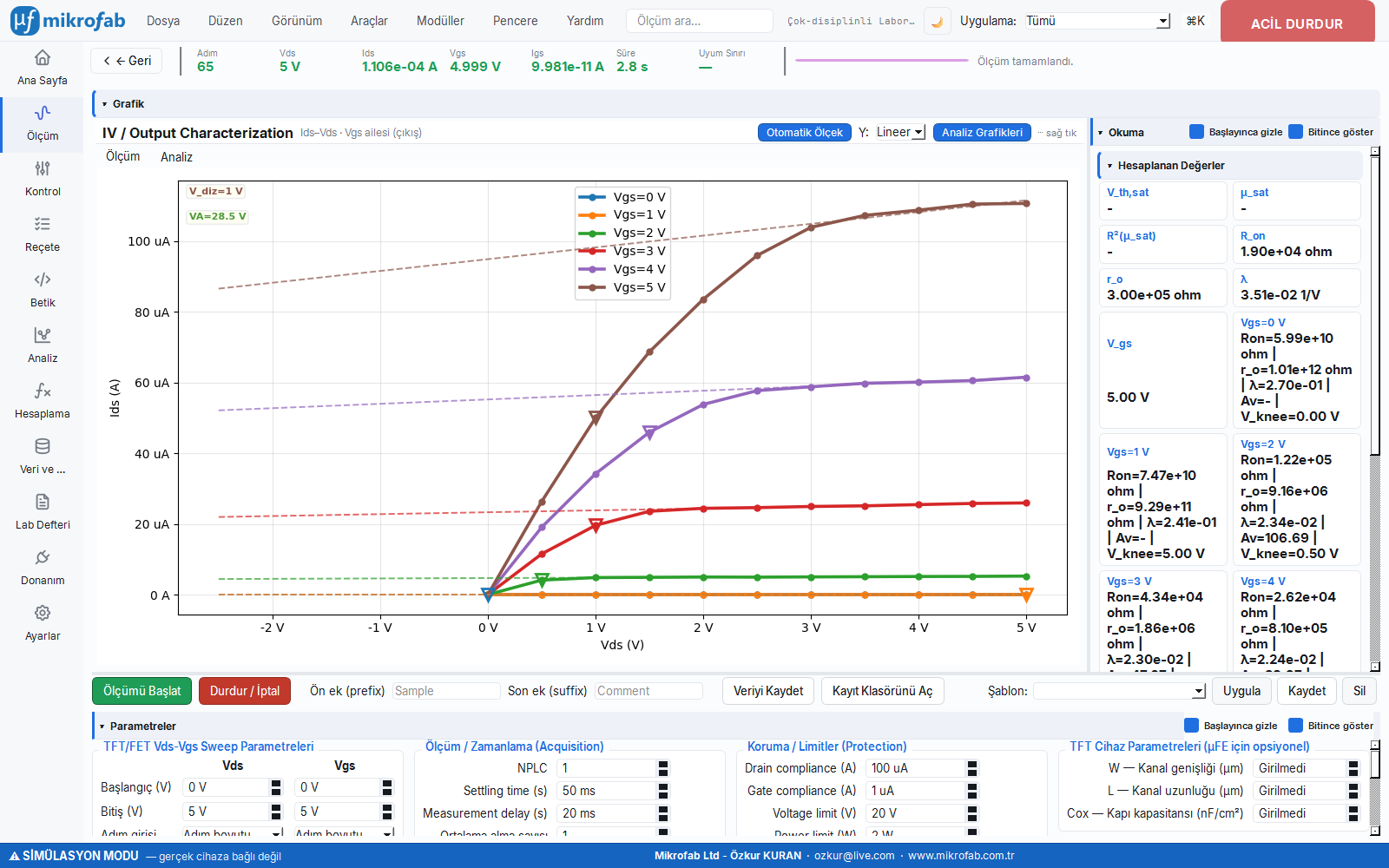
Grafik: Id-Vd eğri ailesi (eksen X: V_DS [V], eksen Y: I_DS [A], her V_GS ayrı eğri).
En yüksek |V_GS| çıkış eğrisi (I_DS–V_DS) kullanılır; aynı eğrinin iki farklı bölgesinin eğimi alınır: düşük V_DS lineer bölge ile yüksek V_DS doyum bölgesi.
- Adım: düşük V_DS lineer bölgesine (|V| ≤ min(0.5, 0.05·V_max)) bir doğru oturtulur; eğim dI_DS/dV_DS alınır →
R_on = |1/eğim|. - Adım: doyum bölgesine (|V| ≥ 0.6·V_max) ikinci bir doğru oturtulur (eğim →
r_o = |1/eğim|) ve bu doğru V_DS=0'a uzatma (ekstrapolasyon) ile geri taşınır. - Sonuç: doyum doğrusunun eğim/kesişiminden
λ = |eğim/kesim|(Early gerilimiV_A = 1/λ). Lineer–doyum geçişi (knee) ise |d²I_DS/dV_DS²| tepesinden okunur.
A.2 Transfer / Aç-Kapa Oranı (Id–Vg)
Bu, bir transistörün "kimlik kartı" sayılan en temel testidir. Savak gerilimini sabit tutup kapı gerilimini (V_GS) yavaşça artırır ve transistörün ne zaman "açıldığını", ne kadar hızlı açıldığını ve ne kadar akıttığını izleriz. Bir ışık kısıcısını (dimmer) çevirip lambanın hangi noktada yanmaya başladığını ve ne kadar parlaklaştığını ölçmek gibidir.
Fiziksel arka plan: Logaritmik Id–Vg eğrisinde üç bölge görürsünüz. Eşik altında (alt-eşik) kanal henüz zayıf doludur; taşıyıcı yoğunluğu Boltzmann istatistiğiyle V_GS'e üstel bağlıdır, bu yüzden I_DS üstel artar ve log eksende düz bir doğru olur — bu doğrunun eğimi alt-eşik eğimini (SS) verir. Eşik üstünde kanal tam oluşur ve I_DS V_GS ile doğrusal/karesel artar. En alttaki düz "taban" ise kapı/eklem sızıntısıdır (I_off). Yani log eğride dirseğin yeri V_th'yi, dikliği SS'i, tavan/taban oranı I_on/I_off'u gözle bile ele verir.
- Neden yapilir: Transistörün açılma eşiğini, anahtarlama keskinliğini ve açık/kapalı durumları ne kadar iyi ayırt ettiğini belirlemek için.
- Ne ogretir / ne olcer: V_th = kanalın açıldığı eşik gerilimi; µ (µFE/µ_sat) = taşıyıcıların kapı alanı altında ne kadar kolay aktığı (mobilite); SS = anahtarlamanın keskinliği, akımı bir dekad artırmak için gereken V_GS, doğrudan arayüz tuzak yoğunluğuna bağlı; I_on/I_off = açık-kapalı akım ayrımı; D_it = SS'ten çıkan arayüz tuzak yoğunluğu; ΔV_th (histerezis) = hareketli yük/tuzaklanma göstergesi.
- Tipik degerler ve yorumu: SS ~60–100 mV/dec iyi (300 K'de ideal alt sınır ≈59.5 mV/dec); >300 mV/dec çok tuzaklı/kötü anahtarlama; I_on/I_off >10⁶ iyi anahtar, iyi IGZO TFT'lerde 10⁸–10¹⁰ olağandır; mobilite a-Si:H ~1, IGZO ~10, poli/kristal-Si yüzlerce cm²/Vs mertebesindedir; |ΔV_th| ≪1 V kararlı sayılır.
- Sik hata / dikkat: Log eksen unutmak (alt-eşik ve I_off görünmez olur); I_off'u tek gürültülü noktadan almak (medyan/derin-off bölge kullanın); mobilite için W/L/Cox girmeyi atlamak (0 girilirse metrik atlanır); dual taramada histerezisi (ΔV_th) gözden kaçırmak; SS'i çok geniş/yanlış pencerede ölçüp olduğundan büyük bulmak.
- Nerede kullanilir: TFT/FET geliştirmede temel karakterizasyon ve sürüm-sürüm kalite karşılaştırması; süreç izleme.
Modül: measure.transfer · Gezinme: Transfer / Aç-Kapa Oranı
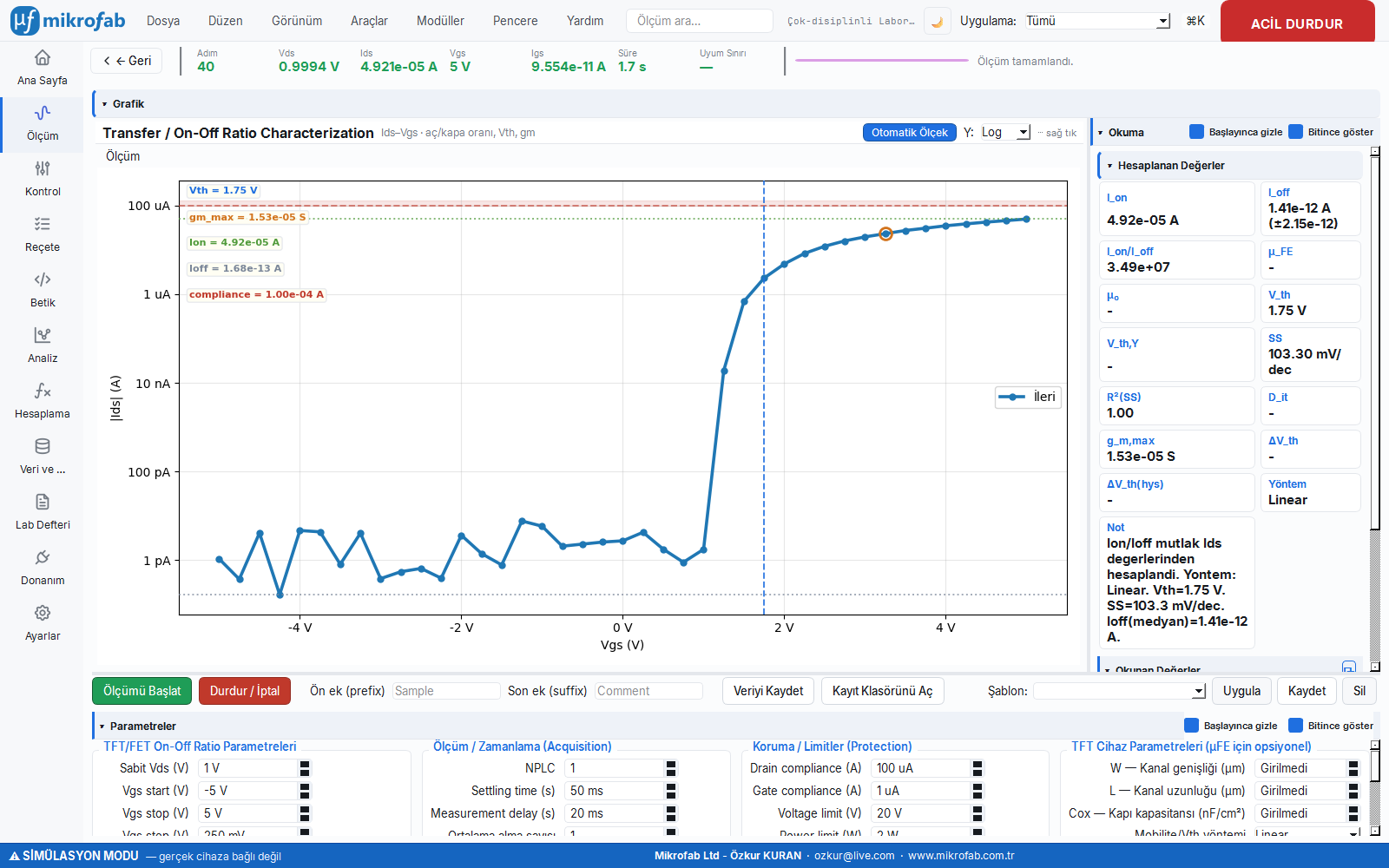
Amaç: Sabit V_DS altında kapı gerilimini (V_GS) tarayarak transfer karakteristiğini ölçer; eşik gerilimi, mobilite, alt-eşik eğimi (SS), aç/kapa oranı ve histerezis çıkarır. Bu, TFT/FET karakterizasyonunun temel ölçümüdür.
Ne ölçer: Her V_GS için I_DS (savak akımı) ve I_GS (kapı sızıntısı), sabit V_DS'de.
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
fixed_vds | V | Sabit savak gerilimi | 1.0 |
vgs_start / vgs_stop / vgs_step | V | Kapı taraması başlangıç/bitiş/adım | -5.0 / 5.0 / 0.25 |
mobility_method | — | Linear (g_m, düşük V_DS) veya Saturation (√I_DS) | Linear |
w_um / l_um / cox_nf_cm2 | µm / µm / nF/cm² | Geometri (µFE için, ops.) | 0.0 |
| Ortak SMU parametreleri | — | NPLC, compliance, settling, averages vb. | (ortak tablo) |
Hesaplanan metrikler (transfer_measurement.py):
| Metrik | Formül / Yöntem | Birim | Dayanak |
|---|---|---|---|
| I_on | max |I_DS| | A | — |
| I_off | Derin-off bölge medyanı (V_GS < Vth−2 V; yoksa en düşük %20 V_GS) — gürültüye dayanıklı | A | — |
| I_on/I_off | I_on / I_off | — | — |
| g_m / g_m,max | g_m = dI_DS/dV_GS (merkezi fark); g_m,max = max|g_m| | S | — |
| V_th (Linear) | Tepe g_m noktasında tanjant ekstrapolasyonu: Vth = V_GS* − I_DS*/g_m,max | V | IEC 60747 |
| V_th (Saturation) | √I_DS–V_GS tanjantının x-kesimi: Vth = V_GS* − √I_DS*/eğim | V | — |
| µFE (Linear) | µFE = g_m,max / ((W/L)·Cox·|V_DS|) | cm²/Vs | — |
| µ_sat (Saturation) | µ_sat = eğim²·2L/(W·Cox) (√I_DS eğimi) | cm²/Vs | — |
| SS (alt-eşik eğimi) | Kayan ~1 dekad pencerede SS = 1000 / (d log₁₀|I_DS|/dV_GS); en dik (min) seçilir | mV/dec | — |
| µ0 / V_th,Y (Y-Function) | Y = I_DS/√g_m doğrusal fitinden: Vth_Y = −kesim/eğim, µ0 = eğim²/((W/L)·Cox·|V_DS|) | cm²/Vs · V | — |
| D_it (arayüz tuzak yoğ.) | D_it = (Cox/q)·(SS/(kT/q·ln10) − 1) | cm⁻²eV⁻¹ | — |
| ΔV_th (histerezis) | ΔVth = Vth_ileri − Vth_geri (yalnız Dual) | V | — |
| Histerezis penceresi | İleri/geri eğrilerin %50·I_max akımındaki V_GS farkı | V | — |
kT/q·ln10 ≈ 59.5 mV/dec'tir. Çıkan SS bu sınırın altındaysa bir fiziksel-sınır uyarısı verilir ve D_it hesaplanmaz (negatif/anlamsız olurdu). SS için scipy varsa Savitzky-Golay ile gürültü düzeltmesi yapılır; yoksa nokta-nokta yönteme düşülür.Grafik: Id-Vg lineer, Id-Vg logaritmik ve gm-Vg eğrileri (X: V_GS [V]; Y: I_DS [A] veya g_m [S]).
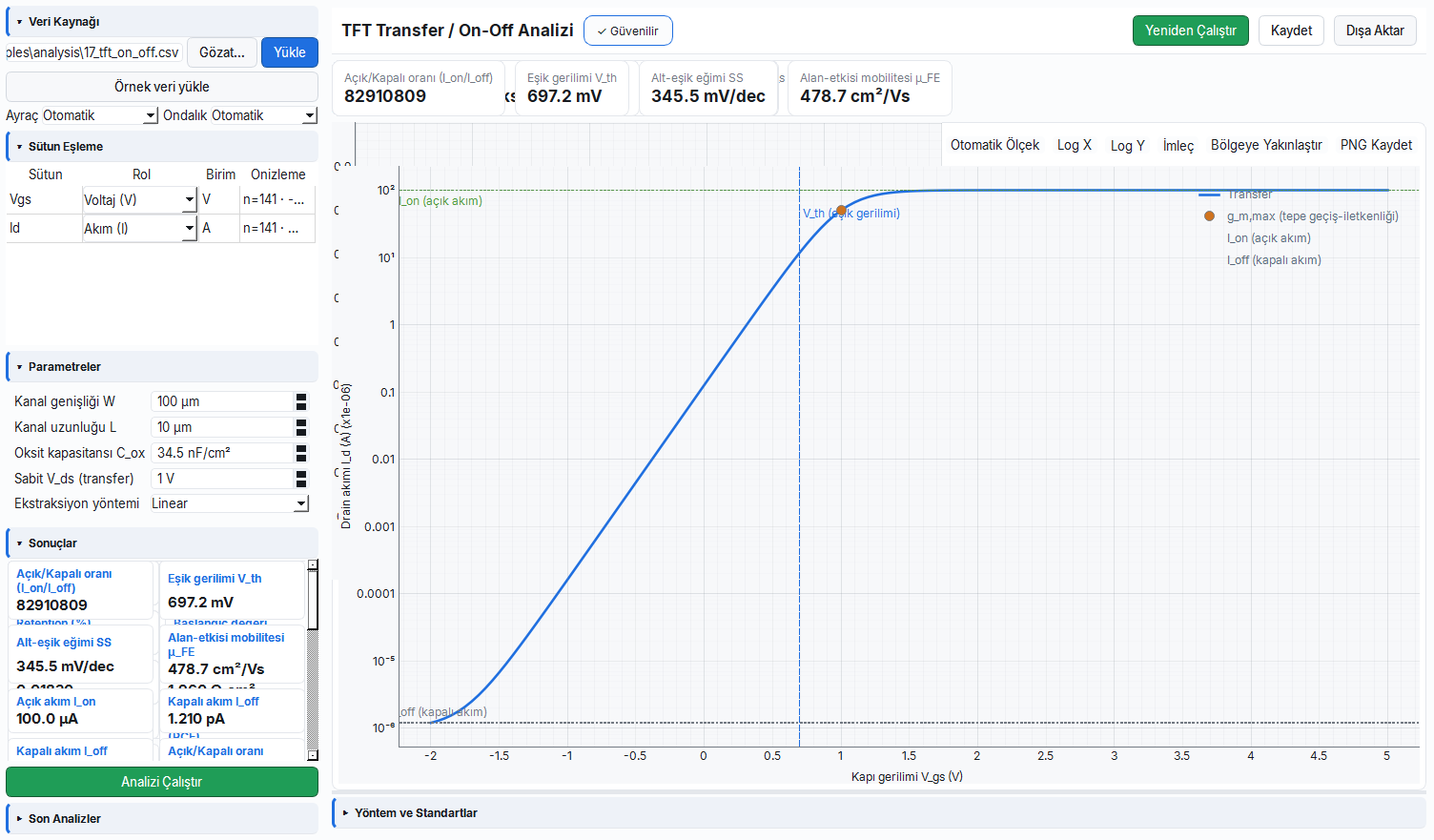
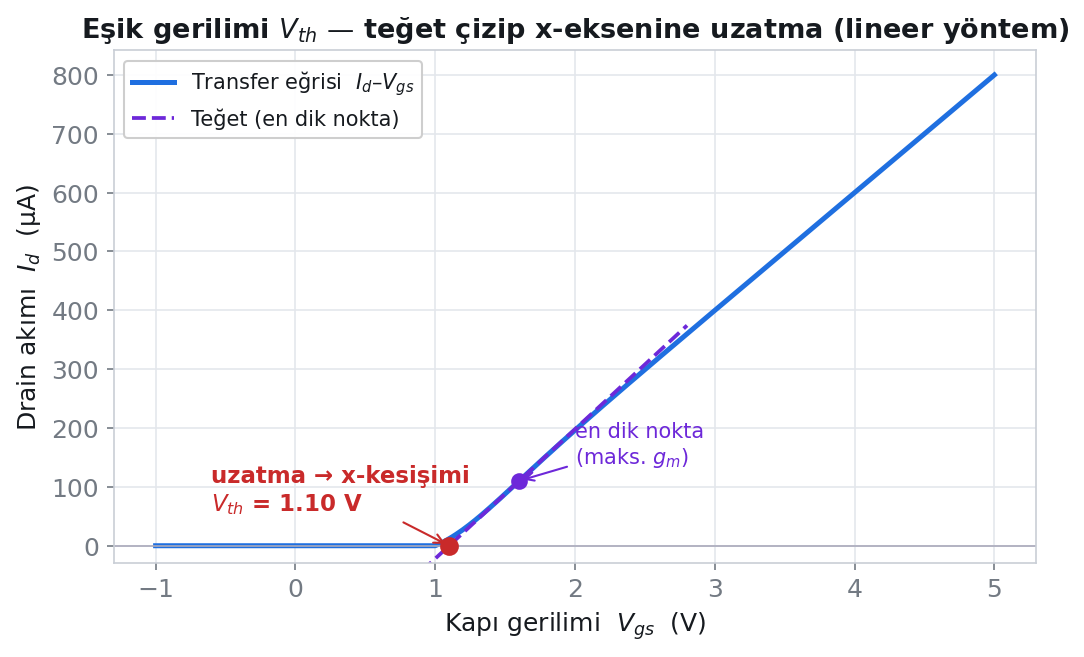
Lineer (düşük V_DS) transfer eğrisi I_DS–V_GS kullanılır; eğrinin en dik olduğu (tepe g_m) noktasında bir teğet çizilir.
- Adım: g_m = dI_DS/dV_GS hesaplanır, en büyük olduğu nokta (g_m,max) bulunur ve oraya teğet oturtulur.
- Adım: teğet x-eksenine (I_DS=0) uzatma (ekstrapolasyon) ile taşınır; x-kesişimi eşik gerilimini verir:
V_th = V_GS* − I_DS*/g_m,max. - Sonuç: teğetin eğimi g_m,max olduğundan mobilite
µFE = g_m,max / ((W/L)·Cox·|V_DS|). (Doyum yönteminde aynı çıkarım √I_DS doğrusunun eğimi ve x-kesişimiyle yapılır.)
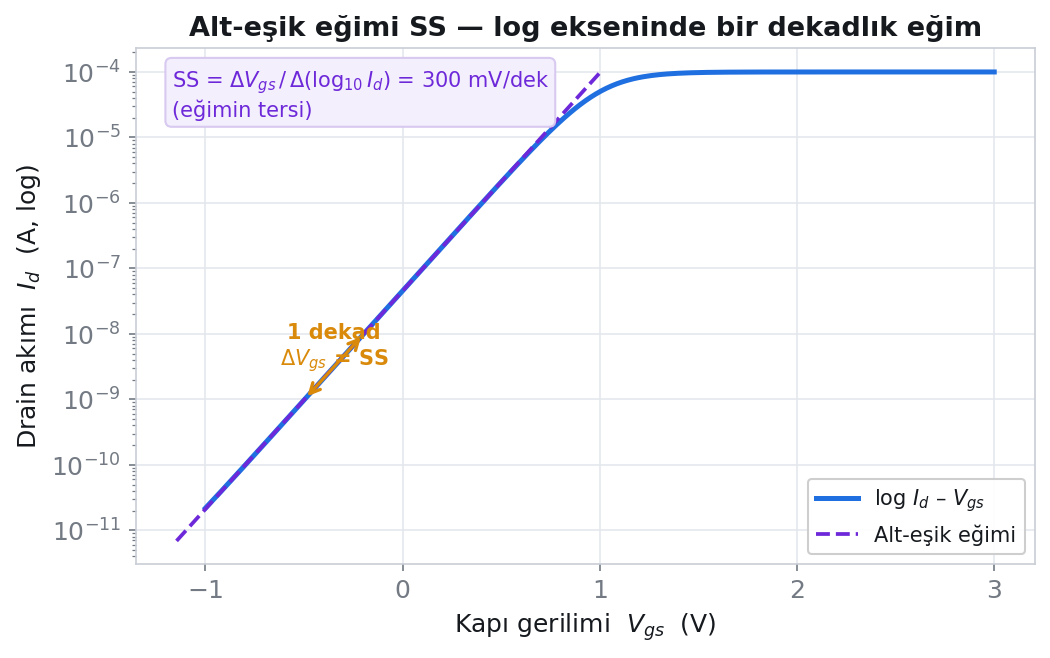
Transfer eğrisi log I_DS–V_GS olarak çizilir (logaritmik dönüşüm); alt-eşik bölgesinde eğri düz bir doğruya dönüşür.
- Adım: alt-eşik bölgesinde yaklaşık bir dekadlık (10× akım) pencereye bir doğru oturtulur.
- Adım: bu doğrunun eğimi d(log₁₀ I_DS)/dV_GS alınır.
- Sonuç: SS bu eğimin tersidir:
SS = ΔV_GS / Δ(log₁₀ I_DS) = 1000/eğim(mV/dek). En dik (en küçük SS veren) pencere seçilir; 300 K'de fiziksel alt sınır ≈59.5 mV/dek.
A.3 Darbeli I-V (Pulsed I-V)
Sürekli gerilim uygulamak cihazı ısıtır ve ölçümü bozar. Bu modda cihaza gerilimi yalnızca çok kısa "darbeler" hâlinde uygular, darbenin sonunda ölçer ve sonra cihazın soğumasını/dinlenmesini bekleriz. Sıcak bir tavaya elinizi sürekli bastırmak yerine hızlıca dokunup çekmek gibidir — gerçek sıcaklığı öğrenir ama yakmazsınız.
Fiziksel arka plan: Sürekli (DC) kutuplamada cihaz ısınır; ısınma mobiliteyi düşürdüğü için I_DS zamanla "çöker" (eğri yüksek V_DS'te aşağı kıvrılır). Ayrıca yavaş tuzaklar ms–s ölçeğinde yük yakalayıp eğriyi kaydırır. Kısa darbe (µs–ms) ısı ve tuzaklar tepki vermeden önce ölçüm alır; uzun dinlenme cihazın soğumasına ve tuzakların boşalmasına izin verir. Bu yüzden darbeli eğri DC eğriden daha "dik/yüksek" çıkar; iki eğri arasındaki fark doğrudan öz-ısınma ve tuzaklanmanın büyüklüğünü verir.
- Neden yapilir: Öz-ısınma ve geçici (tuzak kaynaklı) etkileri devre dışı bırakarak cihazın "gerçek" davranışını görmek için.
- Ne ogretir / ne olcer: Isınmadan arınmış I_DS = cihazın izotermal (gerçek) akımı; DC ile fark = öz-ısınma + tuzaklanma payı; görev çevrimi (duty) etkisi = darbe/dinlenme oranının sonuca sızması.
- Tipik degerler ve yorumu: Görev çevrimi (pulse_width/period) ≪1 (örn %1–10) iyi izolasyon sağlar; GaN/güç cihazlarında DC ile darbeli arasındaki onlarca %'lik sapma "akım çökmesi/current collapse" işaretidir ve ciddi tuzak sorununa işaret eder.
- Sik hata / dikkat: Darbe genişliğini ölçüm aletinin yerleşme süresinden kısa seçmek (akım yerleşmeden okunur); darbe periyodunu darbeden kısa girmek (doğrulama hatası verir); görev çevrimini yüksek bırakıp cihazı yine ısıtmak.
- Nerede kullanilir: Güç cihazları ve ısınmaya/tuzaklara duyarlı TFT'lerin doğru karakterizasyonu.
Modül: measure.pulsed_iv · Gezinme: Darbeli I-V
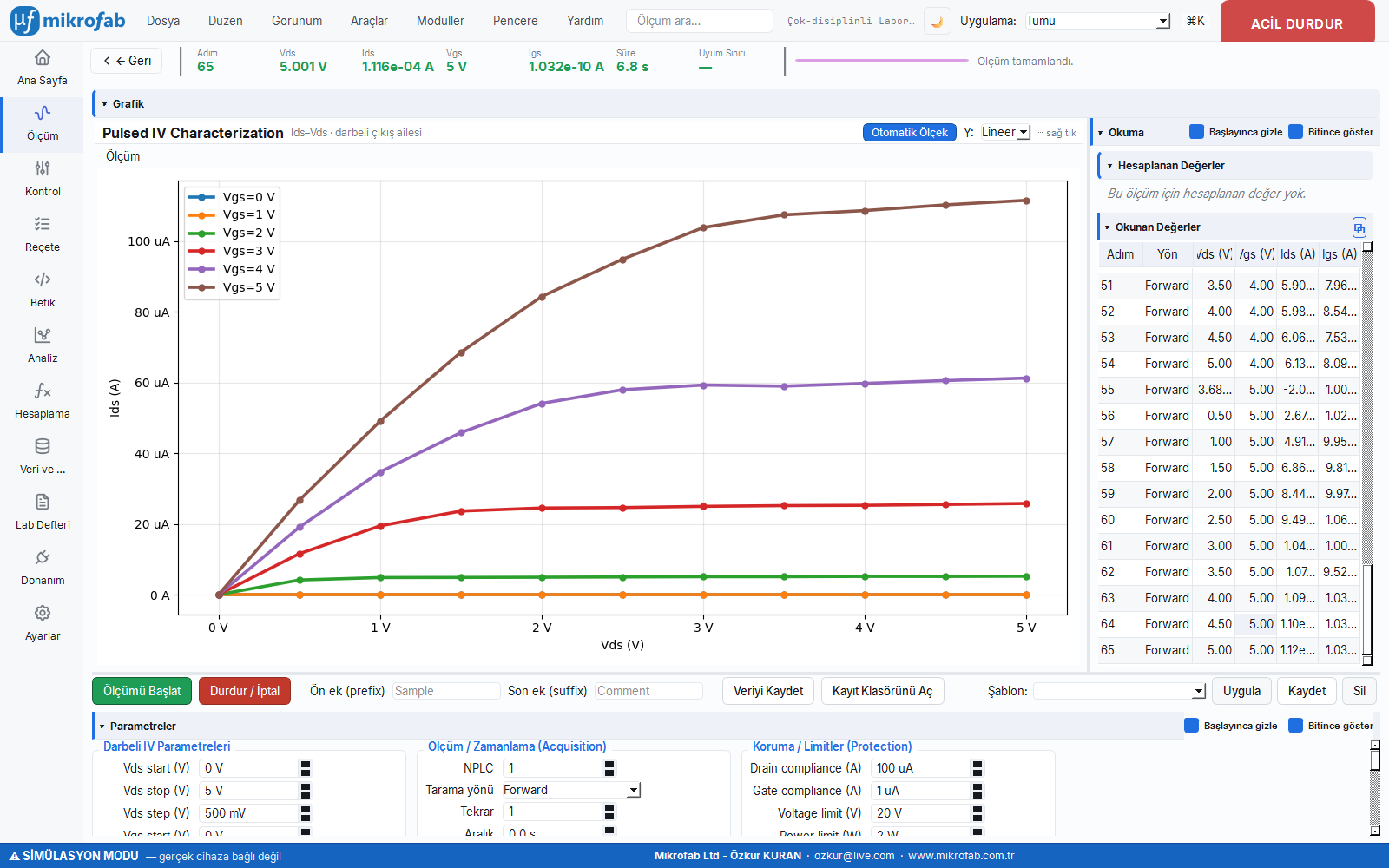
Amaç: Öz-ısınma (self-heating) ve geçici (transient) etkileri en aza indirerek I_DS ölçer. Her noktada cihaz bir temel (baseline) seviyeden kısa bir darbeyle uyarılır; darbe sonunda ölçüm alınır, sonra dinlenme süresi beklenir.
Ne ölçer: Her (V_GS, V_DS) darbesi için darbeli I_DS ve I_GS (zaman-çözünürlüklü).
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
vds_start / vds_stop / vds_step | V | Savak taraması | 0.0 / 5.0 / 0.5 |
vgs_start / vgs_stop / vgs_step | V | Kapı kademesi | 0.0 / 5.0 / 1.0 |
pulse_width_s | s | Darbe genişliği (ölçümün alındığı süre) | 0.01 |
pulse_period_s | s | Darbe periyodu (darbe + dinlenme) | 0.1 |
baseline_vds / baseline_vgs | V | Darbeler arası temel gerilimler | 0.0 / 0.0 |
pulse_width_s ve pulse_period_s pozitif olmalıdır ve darbe genişliği periyottan büyük olamaz; aksi halde ölçüm başlamaz. Düşük görev çevrimi (genişlik ≪ periyot) öz-ısınmayı en aza indirir.Grafik: Id-t (darbe başına zaman yanıtı).
pulse_voltage_and_measure çağrısı benzetilir; temel-darbe-ölçüm-dinlenme döngüsü uygulanır.A.4 Q-Darbeli I-V (Q-Pulsed)
Bazı yarıiletkenlerde gerilim uzun süre uygulandığında içeride yük "tuzaklarına" takılır ve cihazın eşiği kayar. Bu mod, cihazı önce farklı durağan gerilimlerde (V_Q) bekletip ardından hızlı bir tarama yaparak bu kaymayı yakalar. Bir süngeri farklı sürelerde suya batırıp her seferinde ne kadar ağırlaştığını (ne kadar yük çektiğini) tartmak gibidir.
Fiziksel arka plan: Cihaz her durağan gerilimde (V_Q) bir yerleşme süresi bekletilir; bu sırada tuzaklar V_Q'nun belirlediği bir denge doluluğuna ulaşır. Ardından hızlı bir tarama, tuzaklar boşalmadan eşiği okur. Yakalanan yük yalıtkan/arayüzde ek bir elektrik alanı oluşturduğundan V_th kayar; V_th'nin V_Q ile değişimi, her biasın ne kadar yük tuzakladığını gösterir. Eğrilerin V_Q arttıkça düzenli kayması (yatay ötelenmesi), tuzaklanmanın doğrudan görsel kanıtıdır; toplam kayma ΔV_th'den arayüz tuzak yoğunluğu N_t çıkar.
- Neden yapilir: Yük tuzaklanmasının eşik gerilimini ne kadar kaydırdığını ve cihazın bias geçmişine ne kadar duyarlı olduğunu ölçmek için.
- Ne ogretir / ne olcer: ΔV_th,trap = durağan biasa bağlı eşik kayması (V_Q üzerinde max−min); N_t = C_ox·|ΔV_th|/q = arayüz/yüzey tuzak yoğunluğu; V_th(V_Q) eğrisinin yönü = tuzak tipini (kabul edici/verici) ima eder.
- Tipik degerler ve yorumu: İyi bir yalıtkan-arayüzde N_t ~10¹⁰–10¹¹ cm⁻² düşük sayılır; ≳10¹² cm⁻² yüksek tuzaklanma ve kararsızlık demektir; |ΔV_th| birkaç yüz mV'un altında kalması tercih edilir.
- Sik hata / dikkat: Yerleşme süresini (quiescent_settle_time_s) kısa tutmak (tuzaklar dolmaz, ΔV_th eksik çıkar); C_ox (cox_nf_cm2) değerini yanlış/eksik girmek (N_t ölçeği bozulur); turn_on_current eşiğini gürültü tabanına yakın seçip V_th'yi kararsız okumak.
- Nerede kullanilir: Kararlılık/güvenilirlik araştırması ve yalıtkan-arayüz kalitesi değerlendirmesi.
Modül: measure.qpulsed · Gezinme: Q-Darbeli I-V
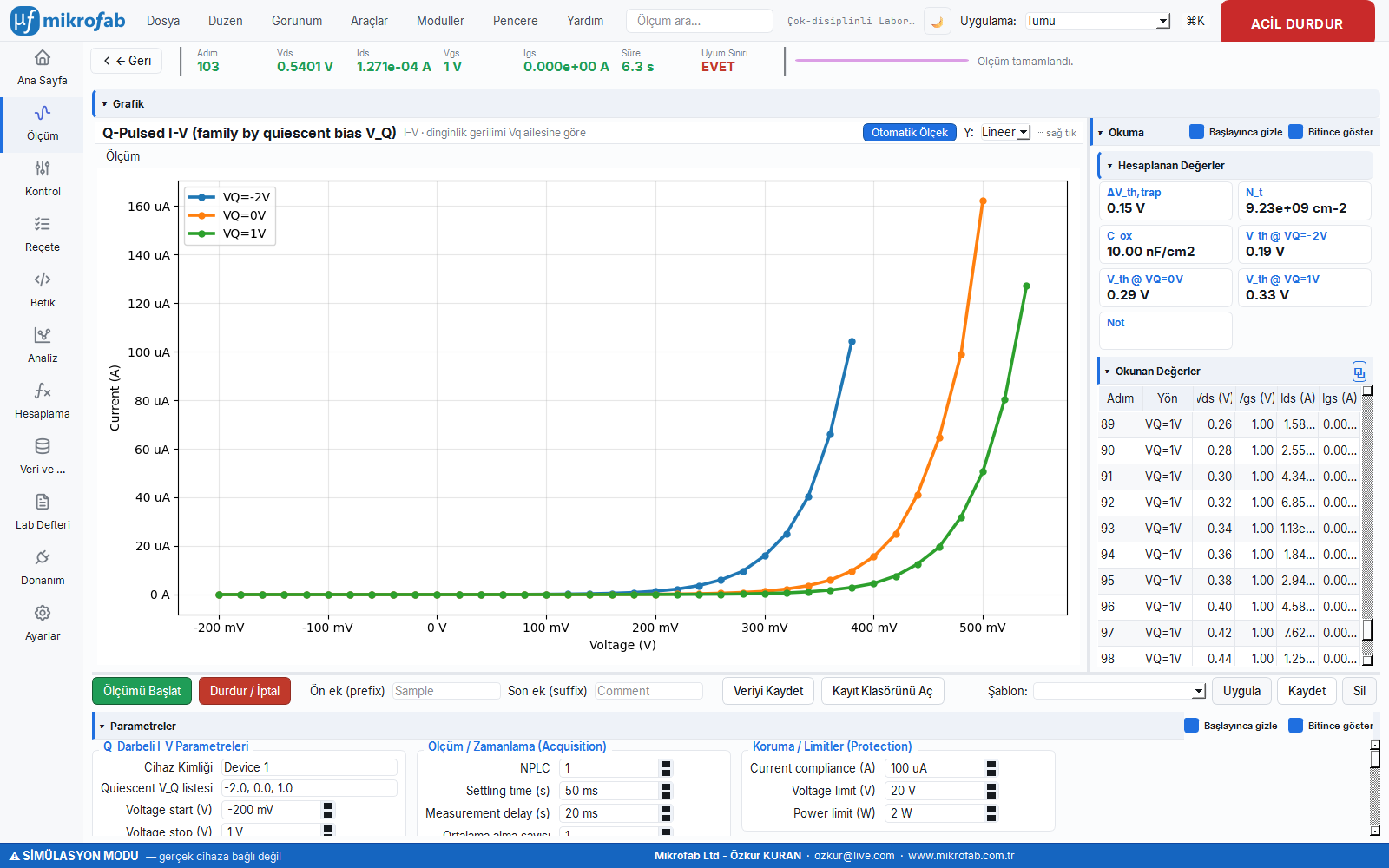
Amaç: Yük-denetimli (charge-controlled) darbe katarı ile her quiescent (durağan) gerilim noktasında (V_Q) darbeli I-V taraması alır. Farklı V_Q'larda eşik (V_th) kayması tuzak (trap) yüklenmesini gösterir; bundan arayüz tuzak yoğunluğu tahmin edilir.
Ne ölçer: Her V_Q için bir I-V eğrisi (V, I); her eğriden V_th çıkarılır.
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
quiescent_v_list | V (liste) | Durağan bias değerleri | [-2.0, 0.0, 1.0] |
quiescent_settle_time_s | s | V_Q uygulandıktan sonra bekleme | 1.0 |
voltage_start / voltage_stop / voltage_step | V | I-V taraması | -0.2 / 1.0 / 0.02 |
pulse_width_s / pulse_period_s | s | Darbe genişliği/periyodu | 1e-4 / 1e-2 |
current_compliance | A | Akım sınırı | 1e-2 |
cox_nf_cm2 | nF/cm² | N_t hesabı için kapasitans | 10.0 |
turn_on_current | A | V_th tanımı için eşik akımı | 1e-6 |
Hesaplanan metrikler:
| Metrik | Formül | Birim |
|---|---|---|
| V_th(V_Q) | Her eğride I'nin turn_on_current'ı ilk aştığı V | V |
| ΔV_th,trap | max V_th − min V_th (V_Q üzerinden) | V |
| N_t (tuzak yoğ.) | N_t = C_ox·|ΔV_th| / q (C_ox = cox_nf×1e-9 F/cm²) | cm⁻² |
Grafik: Id-t (darbe yanıtı).
V_th_kayma = 0.05·V_Q), I0 uygun çarpanla ölçeklenir; böylece N_t tutarlı çıkar.A.5 Donanım Vds–Vgs (Hardware Sweep)
Aynı çıkış eğrisini ölçer, ama tarama döngüsünü yazılım yerine ölçüm cihazının (Keithley) kendi iç motoruna yaptırır. Böylece noktalar tek tek beklenmeden, cihaz hızında toplanır. Alışveriş listesini kasiyere tek tek okumak yerine ürünleri barkod okutucuya hızlıca taratmak gibidir.
Fiziksel arka plan: Ölçülen fiziksel olay A.1 ile aynıdır; tek kanalda lineer→doyum geçişli aynı eğri çıkar, dolayısıyla eğrinin biçimi değişmez. Fark zamanlamadadır: gerilimi adımlayıp okumayı cihazın kendi iç ardışıl-düzeneği (nvbuffer) sabit bir nokta-başı gecikmeyle toplar; her nokta için bilgisayara gidiş-dönüş yoktur. Bunun bedeli, her noktaya tek tip ve kısa bir bekleme düşmesi, esnek ortalama/uyarlanır yerleşme imkânının azalmasıdır.
- Neden yapilir: Çok sayıda noktayı çok hızlı toplamak ve ölçüm süresini kısaltmak için.
- Ne ogretir / ne olcer: Tek kanalın hızlı V-I eğrisi (diğer kanal sabit tutulur); fiziksel yorum A.1'deki R_on/r_o/λ ile aynıdır, yalnız veri daha hızlı toplanır.
- Tipik degerler ve yorumu: 100+ noktayı saniyeler yerine ms mertebesinde alır; nokta-başı gecikme (delay_s) ~1 ms tipiktir; çok düşük akım/yüksek empedansta bu kısa gecikme yerleşmeye yetmeyebilir.
- Sik hata / dikkat: Düşük-akım/yüksek-empedanslı cihazda nokta-başı gecikmeyi çok kısa bırakıp yerleşmemiş (kapasitif) okuma almak; histerezis kapalıyken tuzak/ısınma etkisini fark etmemek; autorange geçişlerinin hızlı taramada yarattığı süreksizliği gözden kaçırmak.
- Nerede kullanilir: Hızın hassasiyetten önemli olduğu seri ölçüm/tarama senaryoları.
Modül: measure.hw_sweep · Gezinme: Donanım Vds–Vgs
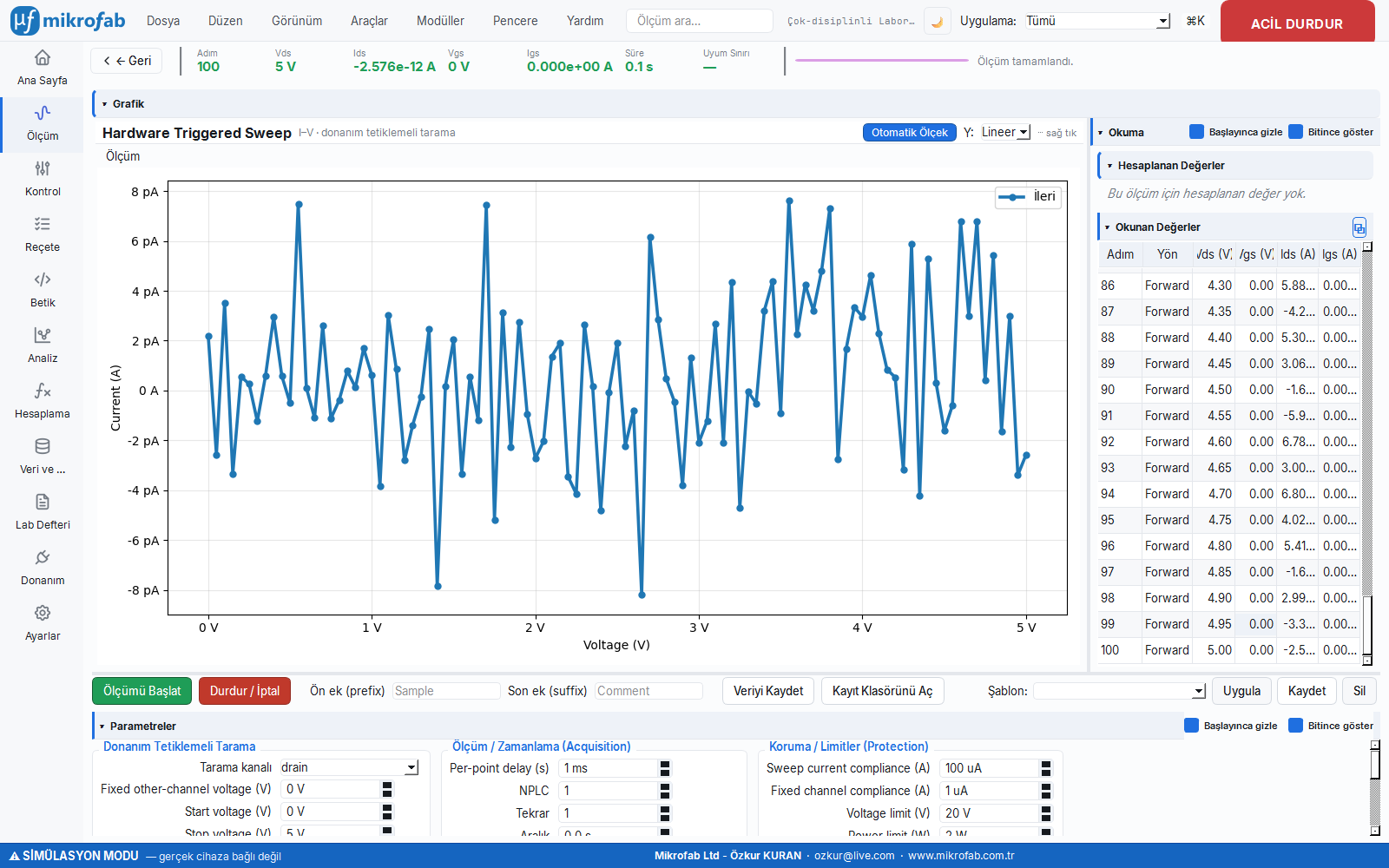
Amaç: Tek bir kanalda (savak veya kapı), Keithley'in kendi donanım tarama motorunu (nvbuffer tabanlı liste taraması) kullanarak hızlı çıkış eğrisi alır. Yazılım döngüsü her noktayı tek tek beklemez; cihaz hızında veri toplanır.
Ne ölçer: Taranan kanalın gerilim-akım eğrisi (diğer kanal sabit tutulur).
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
sweep_channel | — | drain veya gate (taranan kanal) | drain |
fixed_gate_voltage | V | Sabit tutulan diğer kanal gerilimi | 0.0 |
start_voltage / stop_voltage | V | Tarama aralığı | 0.0 / 5.0 |
point_count | — | Tarama noktası sayısı (> 1) | 101 |
delay_s | s | Cihaz iç nokta-başı gecikmesi | 0.001 |
hysteresis | — | İleri + geri tarama | False |
Grafik: Id-Vd (donanım hızında).
run_hardware_linear_voltage_sweep benzetilir; ileri ve (seçiliyse) geri tarama buffer'ları üretilir.A.6 Donanım TFT I-V (Hardware TFT Sweep)
Çıkış eğrisi ailesinin (A.1) hızlandırılmış sürümüdür: her kapı kademesinde savak taramasını cihazın kendi donanımı yapar, yazılım yalnızca kapı adımlarını yönetir. Bir orkestrada her bölüme notayı tek tek söylemek yerine, şefin sadece tempo verip her grubun kendi bölümünü hızla çalmasına izin vermesi gibidir.
Fiziksel arka plan: Eğri ailesi A.1 ile aynı fiziği taşır (her V_GS için lineer→doyum çıkış eğrisi); fark, her kapı kademesinde V_DS taramasının cihazın donanımıyla tek seferde koşturulmasıdır. Yazılım yalnızca V_GS adımları arasında bekler; savak taraması her kademede cihaz hızında biter, böylece tam aile çok daha kısa sürede toplanır. Eğrilerin biçimi değişmediği için R_on/r_o/λ yine A.1 analiziyle çıkarılır.
- Neden yapilir: Tam bir Id-Vd eğri ailesini donanım hızında almak için.
- Ne ogretir / ne olcer: Her V_GS için hızlı çıkış eğrisi (donanım hızında tam aile); çıkarılan R_on, r_o, λ ve doyum davranışı A.1 ile aynı anlamı taşır.
- Tipik degerler ve yorumu: Kademe başına V_DS taraması ms mertebesinde tamamlanır; V_GS değişiminden sonraki yerleşme (settling_time_s) kapının oturması için kritiktir.
- Sik hata / dikkat: V_GS değişiminden sonra yerleşmeyi kısa bırakıp her kademenin ilk noktalarını kaydırmak; düşük akımda donanım gecikmesinin yetersiz kalması; nokta sayısını çok artırıp cihaz buffer sınırına dayanmak.
- Nerede kullanilir: Çok cihazlı/seri üretim testlerinde hızlı çıkış karakterizasyonu.
Modül: measure.hw_tft_sweep · Gezinme: Donanım TFT I-V
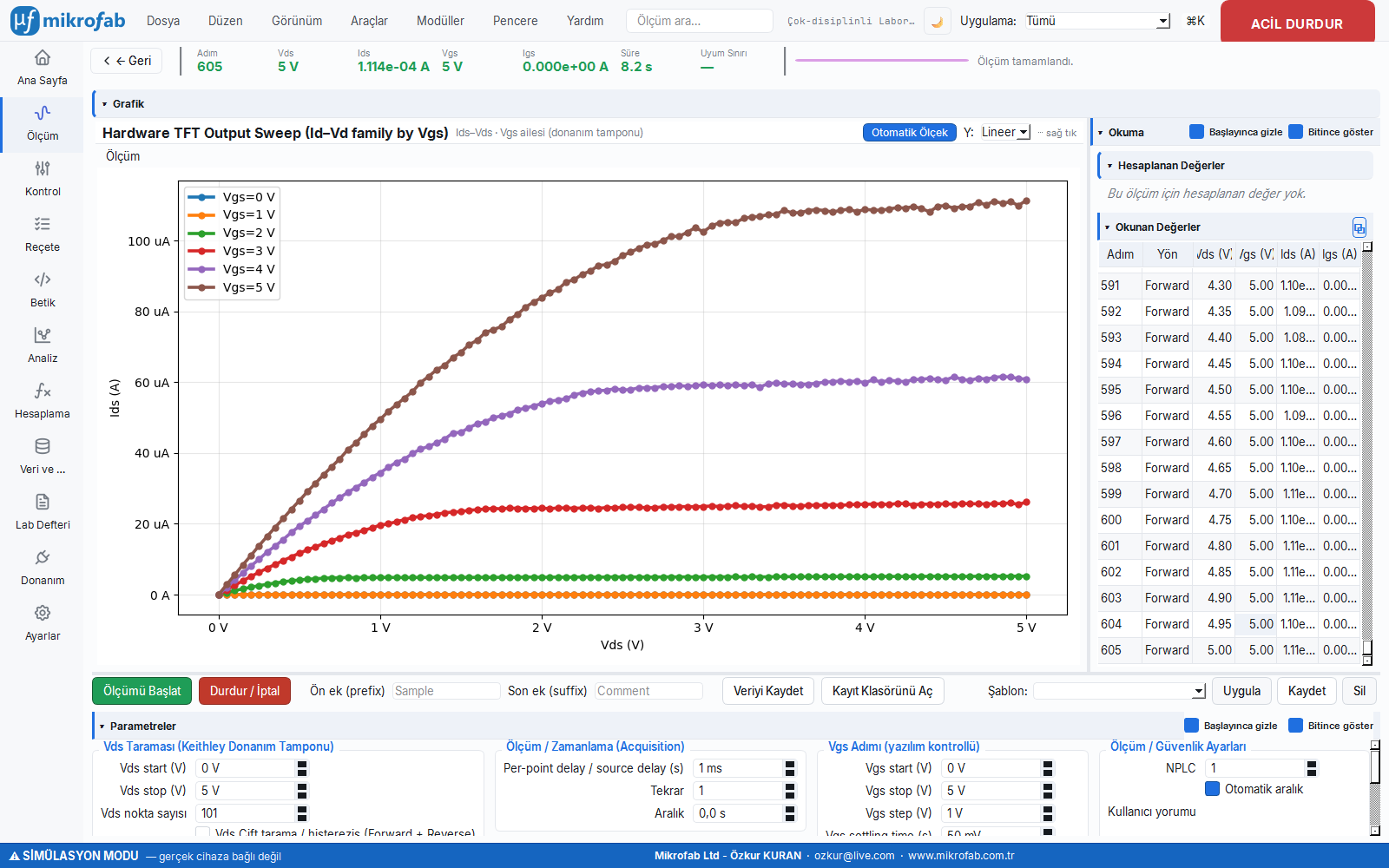
Amaç: Çıkış taramasının donanım-tetiklemeli (buffer tabanlı) sürümü: her V_GS değerinde Keithley kendi iç V_DS taramasını yapar; yazılım yalnız V_GS adımlarını yönetir. Donanım hızında tam bir Id-Vd ailesi sağlar.
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
vds_start / vds_stop | V | Donanım V_DS taraması aralığı | 0.0 / 5.0 |
vds_point_count | — | V_DS nokta sayısı (> 1) | 101 |
vgs_start / vgs_stop / vgs_step | V | Kapı kademesi | 0.0 / 5.0 / 1.0 |
delay_s | s | Keithley iç nokta-başı gecikmesi | 0.001 |
settling_time_s | s | V_GS değişiminden sonra bekleme | 0.05 |
hysteresis | — | V_DS Forward + Reverse | False |
Grafik: Id-Vg (donanım hızında).
B. Diyot Modülleri
Tüm diyot tabanlı modüller ortak bir analiz motorunu paylaşır (diode_analysis_engine.py). Temel fiziksel model, seri (R_s) ve paralel (R_sh) dirençli Shockley diyot denklemidir:
İleri beslemede üstel terim baskındır: ln(I) = ln(I0) + qV/(nkT). Bu doğrunun eğiminden ideallik faktörü ve doyum akımı çıkar:
B.1 Diyot I-V
Diyot, akımı tek yöne geçiren bir "elektriksel turnike"dir. Bu ölçüm, gerilimi negatiften pozitife tarayarak diyotun ileri yönde ne zaman iletime geçtiğini ve ters yönde ne kadar iyi kapattığını gösterir. Bir bisiklet pedalının yalnızca tek yöne kolay çevrilebildiğini, diğer yöne dirençle döndüğünü ölçmek gibidir.
Fiziksel arka plan: İleri beslemede akım, eklemden Shockley denklemine göre üstel akar; log(I)–V grafiğinde bu, eğimi ideallik faktörünü (n) veren düz bir doğrudur. Yüksek akımda doğru "bükülür" çünkü seri direnç (R_s) gerilimin bir kısmını üstüne alır. Ters beslemede yalnızca küçük bir doyum/sızıntı akımı (düz taban) görülür; turn-on dizi (knee), üstel kolun ölçülebilir akımı ilk aştığı yerdir. Bu yüzden lineer grafikte keskin bir "diz", log grafikte ise uzun düz bir üstel kol görürsünüz.
- Neden yapilir: Diyotun ne kadar "ideal" doğrulttuğunu, iletim mekanizmasını ve kayıplarını anlamak için.
- Ne ogretir / ne olcer: V_on = açılma gerilimi; n (ideallik) = iletim mekanizması (≈1 difüzyon, ≈2 üretim-yeniden birleşme/tuzak, >2 yüksek-enjeksiyon, seri direnç veya tünelleme); I0 = doyum akımı (malzeme/bant aralığı/yüzey kalitesi); R_s = seri direnç (iletim kaybı); R_sh = paralel/şönt direnç (kenar sızıntısı); RR = doğrultma oranı.
- Tipik degerler ve yorumu: Si pn diyot V_on ~0.6 V, Ge ~0.3 V, GaN/LED ~2–3 V; n 1–2 iyi, >2 tuzak/sızıntı baskın; I0 ne kadar küçük (pA–nA) o kadar iyi; RR ≫10³ iyi doğrultucu; R_sh yüksek (≫MΩ) iyi.
- Sik hata / dikkat: Fit aralığını (fit_v_min/fit_v_max) seri direncin büktüğü yüksek-akım bölgesine taşıyıp n'i şişirmek; log eksen kullanmamak; compliance'a çarpıp ileri kolu kırpmak; ters sızıntıyı ölçüm gürültü tabanıyla karıştırmak.
- Nerede kullanilir: Güç/sinyal diyodu seçimi, malzeme kalitesi ve eklem (junction) kalite kontrolü.
Modül: measure.diode · Gezinme: Diyot I-V

Amaç: Tek kanallı SMU ile diyotun ileri+ters gerilim taramasını alır; doğrultma, ideallik faktörü, doyum akımı ve seri direnç çıkarır.
Ne ölçer: Her V için akım I (tek kanal, V_GS=0).
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
voltage_start / voltage_stop / voltage_step | V | I-V taraması | -2.0 / 2.0 / 0.05 |
current_compliance | A | Akım sınırı | 1e-3 |
turn_on_current | A | V_on tanımı için eşik akımı | 1e-6 |
rectification_voltage | V | Doğrultma oranı referans gerilimi ±V_rect | 1.0 |
fit_v_min / fit_v_max | V | ln(I)-V ideallik fit aralığı | 0.05 / 0.50 |
Hesaplanan metrikler:
| Metrik | Formül / Yöntem | Birim |
|---|---|---|
| V_on (turn-on) | I'nin turn_on_current'ı ilk aştığı V (interpolasyon) | V |
| n (ideallik) | n = q/(kT·eğim), ln(I)-V fit (shunt-düzeltmeli, gürültü filtreli) | — |
| I0 (doyum akımı) | I0 = exp(kesim) | A |
| R_s (seri direnç) | Cheung-1: dV/d(lnI) = R_s·I + nkT/q → eğim = R_s | Ω |
| R_sh (paralel direnç) | Düşük-V (V ≤ 0) bölgede R_sh = dV/dI | Ω |
| RR (doğrultma oranı) | RR = |I(+V_rect)| / |I(−V_rect)| | — |
| İleri akım / ters sızıntı | I@+V_rect / |I@−V_rect| | A |
| V_F@1mA, r_d@1mA | 1 mA'da ileri gerilim ve diferansiyel direnç | V / Ω |
| Fit R² | ln(I)-V fit kalitesi | — |
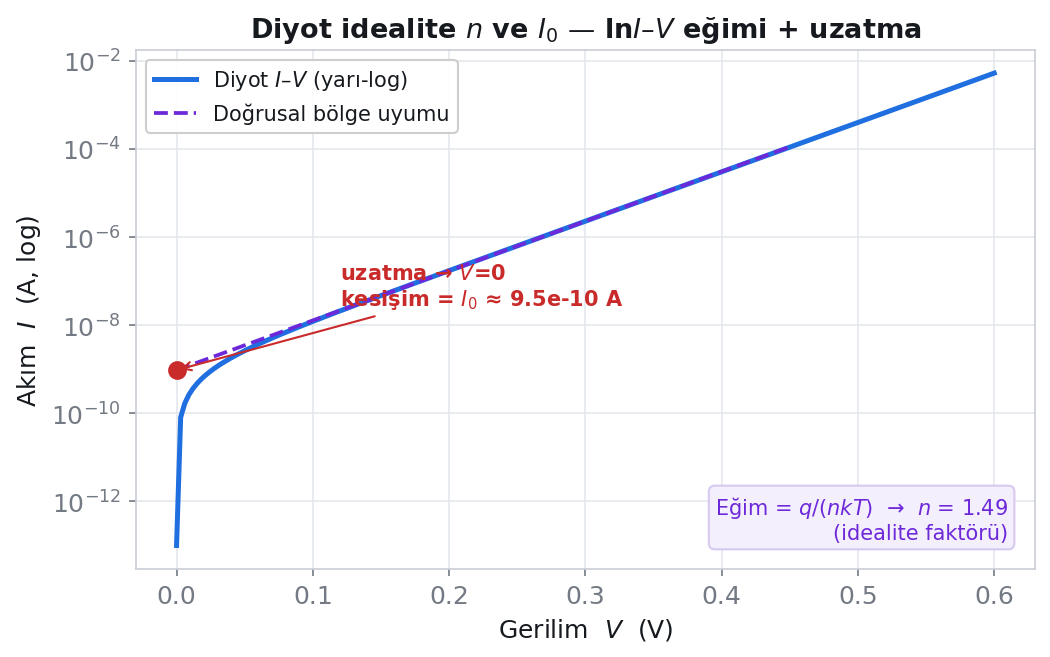
İleri besleme verisi ln I–V (yarı-logaritmik dönüşüm) olarak çizilir; üstel kol burada düz bir doğruya oturur: ln(I) = ln(I0) + qV/(nkT) (fit aralığı fit_v_min … fit_v_max).
- Adım: üstel kolun düz bölgesine (seri direncin büktüğü yüksek-akım bölgesinden önce) bir doğru oturtulur ve eğim d(ln I)/dV alınır.
- Adım: aynı doğru uzatma (ekstrapolasyon) ile V=0'a taşınır; düşey eksen kesişimi
ln(I0)'dır. - Sonuç:
n = q/(k·T·eğim)(300 K'dekT/q = 0.025852 V);I0 = exp(kesim). Seri direnç R_s, Cheung-1 doğrusunun (dV/d(lnI)–I) eğiminden çıkar.
Grafik: I-V lineer ve I-V logaritmik.
B.2 Schottky I-V
Schottky diyodu, metal ile yarıiletkenin doğrudan temasından oluşur ve aralarında bir enerji "bariyeri" doğar. Bu ölçüm normal diyot taramasıyla aynıdır; farkı, analizde bu bariyerin yüksekliğini sayısal olarak çıkarmasıdır. İki farklı malzemenin birleştiği yerdeki "duvarın" yüksekliğini elektriksel olarak ölçmek gibidir.
Fiziksel arka plan: Metal ile yarıiletkenin temasında bir enerji bariyeri (Φ_B) doğar; ileri beslemede taşıyıcılar bu bariyeri termiyonik emisyonla aşar. Doyum akımı I0, Richardson denklemiyle bariyere üstel bağlıdır (I0 = A**·T²·Area·exp(−qΦ_B/kT)); bilinen A**, T ve alandan I0 geri çözülerek Φ_B bulunur. İdeallik n'in 1'den belirgin büyük olması bariyer düzgünsüzlüğünü, görüntü-kuvveti düşmesini veya ara yüzey tabakasını işaret eder; Cheung yöntemi seri direnci üstel koldan ayırır. Eğri biçimi normal diyotunkiyle aynıdır; ek bilgi tümüyle I0'ın mutlak büyüklüğünden gelir.
- Neden yapilir: Metal-yarıiletken kontağın kalitesini ve bariyer yüksekliğini belirlemek için.
- Ne ogretir / ne olcer: Φ_B = Schottky bariyer yüksekliği (kontağın doğrultma gücü); n = bariyer homojenliği/ideallik; J0 = I0/Area = alan-normalize doyum akım yoğunluğu (alandan bağımsız karşılaştırma); R_s,Cheung = üstel koldan ayrılan seri direnç.
- Tipik degerler ve yorumu: Si Schottky için Φ_B ~0.6–0.85 eV tipiktir; n ~1.02–1.2 iyi/temiz kontak, ≳1.5 düzgünsüz veya ara yüzeyli kontak demektir; J0 ne kadar küçükse bariyer o kadar yüksektir.
- Sik hata / dikkat: Doğru malzeme/Richardson sabitini (A_richardson) girmemek (Φ_B ofsetlenir); aktif alanı (device_area_um2) yanlış girmek (J0 ve Φ_B kayar); sıcaklığı varsayılan 300 K'de bırakıp gerçek T'yi yansıtmamak; ideallik fitini seri-direnç bükülmesine taşımak.
- Nerede kullanilir: Kontak metalürjisi araştırması, hızlı güç diyotları ve sensör geliştirme.
Modül: measure.schottky · Gezinme: Schottky I-V

Amaç: Ölçüm akışı Diyot I-V ile aynıdır; fark analiz katmanındadır. Aktif alan, Richardson sabiti ve sıcaklık verilerek termiyonik emisyon modelinden Schottky bariyer yüksekliği (Φ_B), Cheung-1/2 seri direnç ve doyum akım yoğunluğu (J0) çıkarılır.
Ne ölçer: Her V için akım I (tek kanal).
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
voltage_start / voltage_stop / voltage_step | V | I-V taraması | -1.0 / 1.0 / 0.02 |
current_compliance | A | Akım sınırı | 1e-2 |
rectification_voltage | V | Doğrultma referansı | 0.5 |
fit_v_min / fit_v_max | V | İdeallik fit aralığı | 0.10 / 0.40 |
device_area_um2 | µm² | Aktif alan (dahili: cm² = ×1e-8) | 10000.0 |
material | — | Si-n / Si-p / GaAs-n / GaN-n / Custom | Si-n |
A_richardson | A/cm²K² | Etkin Richardson sabiti (malzemeden gelir) | 110.0 |
temperature_K | K | Ölçüm sıcaklığı | 300.0 |
cheung_I_min | A | Cheung fit alt sınırı | 1e-4 |
Richardson sabiti ön ayarları: Si-n 110, Si-p 32, GaAs-n 8, GaN-n 26 A/cm²K².
Hesaplanan metrikler (B.1'deki tüm diyot büyüklüklerine ek olarak):
| Metrik | Formül | Birim |
|---|---|---|
| Φ_B (bariyer yüksekliği) | Φ_B = (kT/q)·ln(A**·T²·Area / I0) | eV |
| J0 (doyum akım yoğunluğu) | J0 = I0 / Area | A/cm² |
| n_Cheung, R_s,Cheung1 | Cheung-1 kesim/eğim | — / Ω |
| R_s,Cheung2, n·Φ_B | Cheung-2: H(I) = V − nVt·ln(I/(A**T²Area)) = R_s·I + n·Φ_B | Ω / eV |
Ölçüm akışı diyotla aynıdır: ileri kol ln I–V doğrusuna dönüştürülür. n ve I0 bu doğrudan, Φ_B ise I0'dan Richardson (termiyonik emisyon) bağıntısıyla hesaplanır.
- Adım: ln I–V doğrusunun eğimi →
n = q/(k·T·eğim); doğruyu V=0'a uzatma →I0 = exp(kesim). - Adım: aktif alan (Area), sıcaklık (T) ve Richardson sabiti (A**) girilir.
- Sonuç: bariyer yüksekliği grafikten değil I0'dan çıkar:
Φ_B = (kT/q)·ln(A**·T²·Area / I0). Seri direnç için Cheung yöntemi (dV/d(lnI)–I doğrusunun eğimi) kullanılır.
Grafik: I-V logaritmik.
I0 = A**·T²·Area·exp(−Φ_B/Vt), n=1.6, R_s=30 Ω); analiz bu Φ_B'yi geri kazanır.B.3 Ters Toparlanma (Reverse Recovery, trr)
Bir diyot iletimden kesime geçerken bir an için ters yönde akım akıtır — çünkü içindeki depolanmış yükün boşalması zaman alır. Bu ölçüm, diyotu aniden ters çevirip bu geçici akımın ne kadar sürede sönümlendiğini zaman ekseninde kaydeder. Musluğu kapattığınızda borudaki suyun bir süre daha damlamasını kronometreyle ölçmek gibidir.
Fiziksel arka plan: İleri iletimde bir pn diyodun eklem bölgesinde azınlık taşıyıcı yükü (Q) depolanır. Cihaz aniden ters çevrildiğinde diyot bloklamadan önce bu yükün süpürülüp boşalması gerekir; bu sırada büyük bir ters akım akar, sonra azınlık taşıyıcı ömrüyle (τ) üstel sönümlenir. Schottky diyot çoğunluk-taşıyıcılı çalıştığı için neredeyse hiç azınlık yükü depolamaz; bu yüzden toparlanması çok hızlıdır. Grafikte gördüğünüz negatif akım çukuru ve ardındaki üstel kuyruk, doğrudan bu yük boşalmasının resmidir.
- Neden yapilir: Diyotun ne kadar hızlı anahtarlayabildiğini (yüksek frekansa uygunluğunu) ölçmek için.
- Ne ogretir / ne olcer: t_rr = ters toparlanma süresi (anahtarlama hızı); I_rr = tepe ters akım; Q_rr = I_F·τ = toparlanma yükü (boşaltılan toplam yük); τ = azınlık taşıyıcı ömrü (üstel fitten).
- Tipik degerler ve yorumu: Hızlı/Schottky diyotta t_rr ~ ns mertebesinde (τ ~10 ns); standart pn doğrultucuda ~µs (τ ~µs–10 µs); küçük Q_rr / I_rr / t_rr yüksek frekansta düşük anahtarlama kaybı demektir.
- Sik hata / dikkat: τ için boyutsal olarak hatalı
2·Q_rr/I_rr²formülünü kullanmak (yandaki bilimsel notta açıklandığı gibi yanlıştır; τ üstel fitten çıkar); örnekleme aralığını (sample_interval_s) çok kaba bırakıp tepeyi/sönümü kaçırmak; t_rr'yi raporlarken i_rr_fraction tanımını belirtmemek. - Nerede kullanilir: Anahtarlamalı güç kaynakları ve yüksek hızlı doğrultucu tasarımı.
Modül: measure.rev_recovery · Gezinme: Ters Toparlanma (trr)
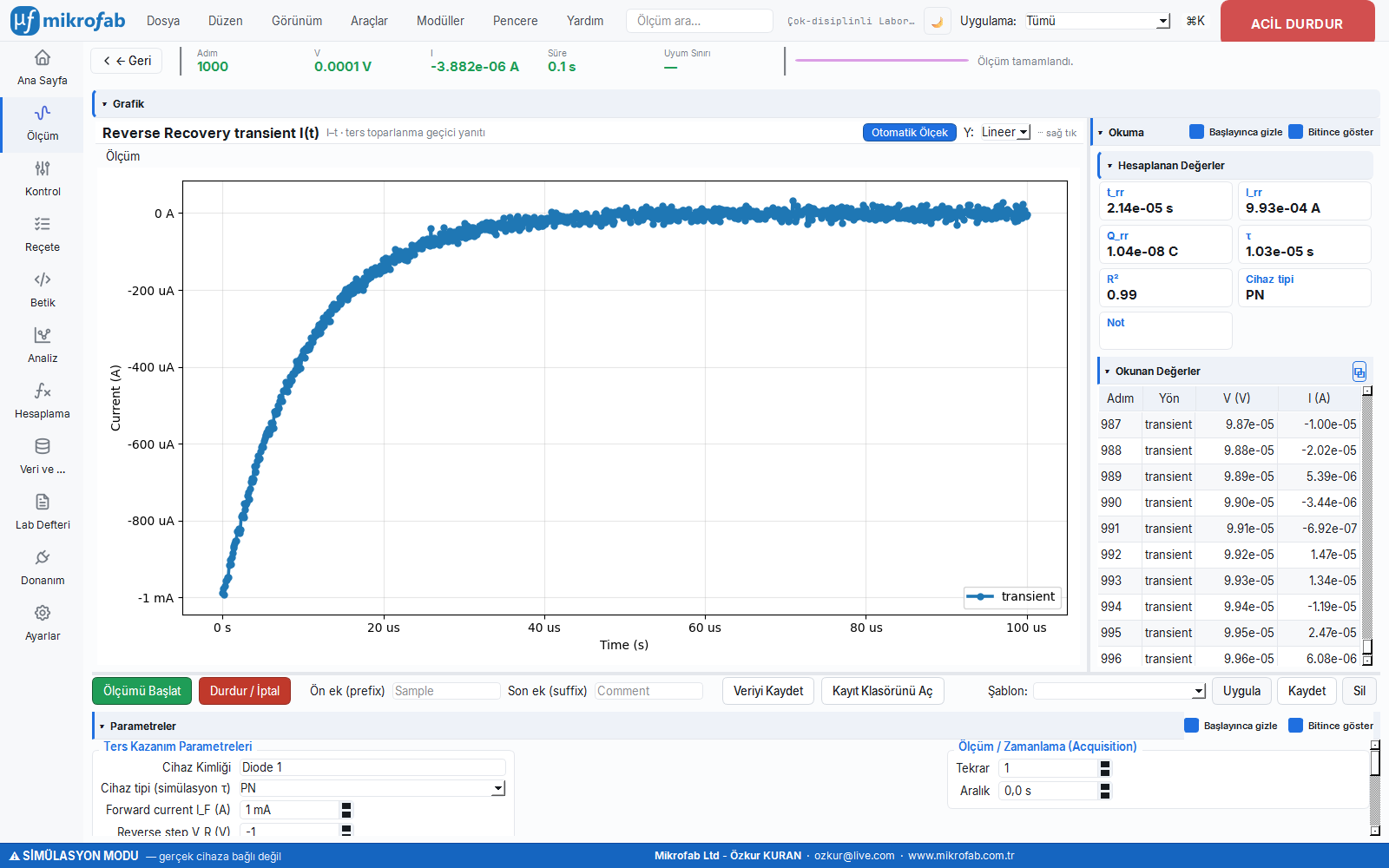
Amaç: İleri besleme akımından (I_F) ters gerilime (V_R) ani anahtarlama sonrası geçici ters akım azalışını zaman-domeninde ölçer; anahtarlama hızı göstergesi olan ters toparlanma süresini çıkarır.
Ne ölçer: Zaman serisinde geçici akım I(t) (x ekseni zaman).
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
i_forward | A | İleri besleme akımı (I_rr referansı) | 1e-3 |
v_reverse | V | Ters basamak gerilimi | -1.0 |
t_forward_s | s | İleri besleme süresi | 1e-3 |
t_measure_s | s | Ölçüm penceresi | 1e-4 |
sample_interval_s | s | Zaman çözünürlüğü | 1e-7 |
i_rr_fraction | — | t_rr tanımı: I_rr'nin bu oranı | 0.1 |
device_type_hint | — | Schottky / PN (mock τ seçimi) | PN |
Hesaplanan metrikler:
| Metrik | Formül | Birim |
|---|---|---|
| I_rr | max |I(t)| (tepe ters akım) | A |
| Q_rr | Q_rr = ∫|I(t)| dt (trapez) | C |
| τ (azınlık taşıyıcı ömrü) | ln|I|–t üstel sönüm fitinden τ = −1/eğim | s |
| t_rr | |I|'in i_rr_fraction·I_rr'ye düştüğü an (interpolasyon) | s |
τ ≈ 2·Q_rr/I_rr² ifadesi boyutsal olarak hatalıdır (C/A² = s/A). Doğru ilişkiler üstel modelde Q_rr = I_F·τ ve t_rr = τ·ln(1/i_rr_fraction)'tir; bu yüzden τ üstel fitten çıkarılır.Grafik: I-t (geçici).
I(t) = −I_F·exp(−t/τ) + küçük gürültü; τ tipi ipucundan seçilir (Schottky ≈ 10 ns, PN ≈ 10 µs).C. Özdirenç / Direnç Modülleri (TFT / İnce Film)
C.1 Dört-Nokta Özdirenç (Four-Point Probe)
Bir ince filmin "ne kadar iletken" olduğunu ölçer. Dört prob kullanılır: dıştaki ikisinden akım sürülür, içteki ikisinden gerilim okunur — böylece kabloların ve temas noktalarının kendi direnci ölçüme karışmaz. Bir yolun gerçek uzunluğunu, başındaki ve sonundaki gişeleri saymadan ölçmek gibidir.
Fiziksel arka plan: Akım dış problardan sürülür, gerilim iç problardan okunur; gerilim problarından akım geçmediği için onların temas/kablo direnci ölçüme IR düşüşü olarak karışmaz — 4-nokta yönteminin tüm gücü budur. İnce bir tabakada (kalınlık ≪ prob aralığı) akım iki boyutlu yayılır ve geometrik faktör π/ln2 ≈ 4.5324, ölçülen direnci tabaka direncine (R_s) çevirir. Film kalınlığı bilinirse özdirenç ρ = R_s·t olur. V-I noktaları orijinden geçen düz bir doğru çizmelidir; eğrisellik veya kayma kötü kontak/gürültü demektir.
- Neden yapilir: Bir kaplama/filmin iletkenlik kalitesini temas direncinden arınmış biçimde ölçmek için.
- Ne ogretir / ne olcer: R_s = tabaka direnci (Ω/sq, kalınlıktan bağımsız film göstergesi); ρ = özdirenç (malzemenin içsel direnci); σ = 1/ρ = iletkenlik.
- Tipik degerler ve yorumu: Metal kontak filmleri (Al/Au) ~mΩ–onlarca Ω/sq; ITO gibi şeffaf iletkenler ~10–100 Ω/sq; katkılı/zayıf yarıiletken filmler kΩ–MΩ/sq; metallerin özdirenci ~10⁻⁶ Ω·cm, yarıiletkenlerde çok daha yüksektir.
- Sik hata / dikkat: İnce/kalın rejim ayrımını (t < s/2 ince) gözden kaçırıp yanlış ρ formülü kullanmak; kalınlığı (film_thickness_nm) girmeyince yalnızca R_s çıkacağını unutmak; fit R²<0.99'u (kötü kontak/gürültü) yok saymak; numune kenarına çok yakın ölçüp kenar etkisine düşmek.
- Nerede kullanilir: İnce film/kaplama üretiminde kalite kontrol ve malzeme karşılaştırması.
Modül: measure.four_point · Gezinme: Dört-Nokta Özdirenç
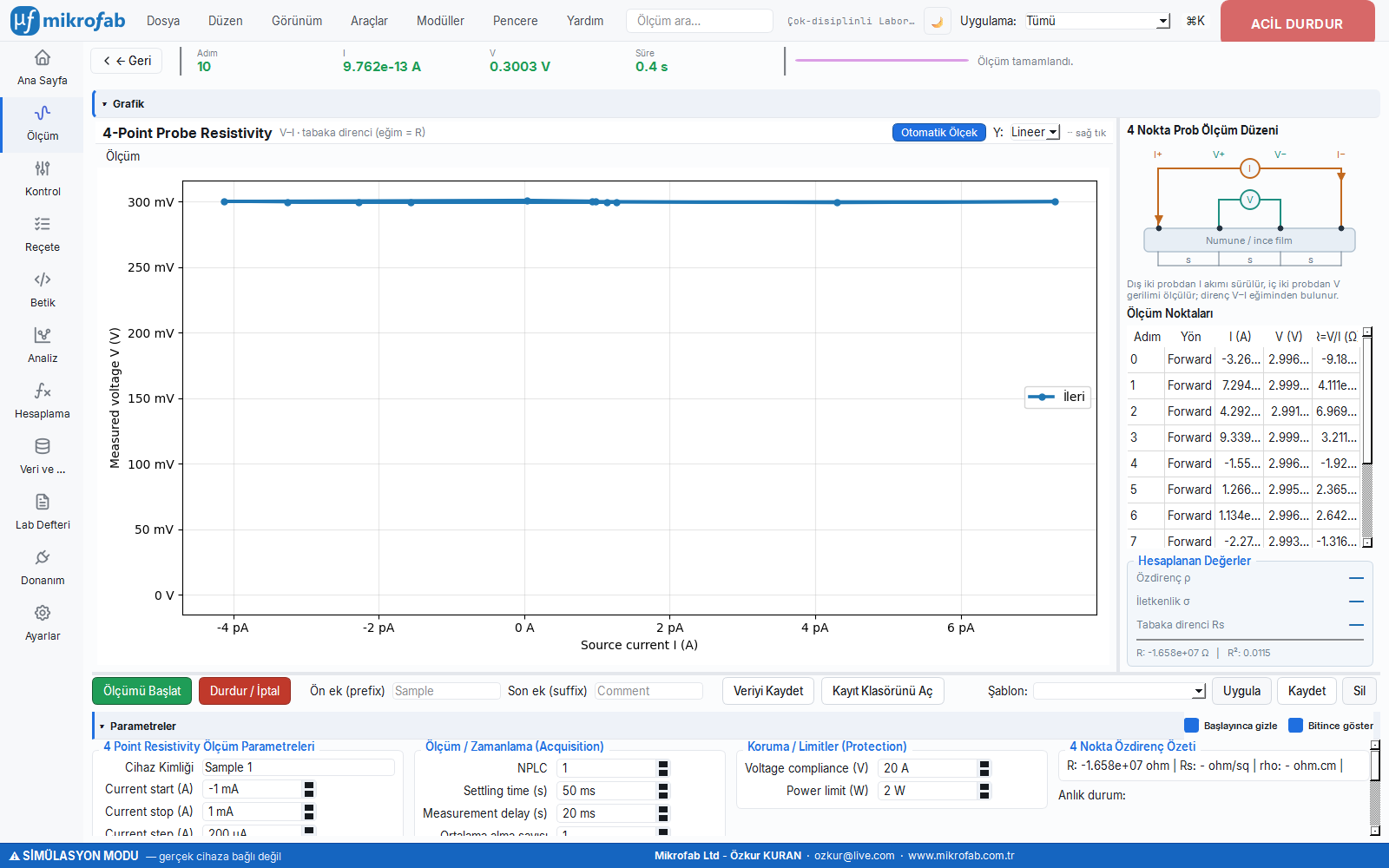
Amaç: Kolinear (eş-aralıklı) 4-nokta probla tabaka direnci (sheet resistance) ve özdirenç ölçer. Dış problardan (1 ve 4) bir akım dizisi sürülür, iç problardan (2 ve 3) 4-telli gerilim okunur; bu, kablo/temas direncini ölçüm dışı bırakır.
Ne ölçer: Sürülen akım dizisine karşı ölçülen gerilim; R = dV/dI.
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
current_start / current_stop / current_step | A | Kaynak akım taraması | -1e-3 / 1e-3 / 2e-4 |
probe_spacing_in | inç | Prob arası mesafe (kolinear, eşit) | 0.1 |
film_thickness_nm | nm | Film kalınlığı (0 = bilinmiyor → yalnız R_s) | 0.0 |
voltage_limit | V | Akım kaynağı gerilim compliance | (ortak) |
Hesaplanan metrikler (geometrik faktör π/ln2 ≈ 4.5324):
| Metrik | Formül | Birim |
|---|---|---|
| R | V-I doğrusal fit eğimi (dV/dI) | Ω |
| R_s (tabaka direnci) | R_s = (π/ln2)·R ≈ 4.5324·R | Ω/sq |
| ρ (özdirenç) — ince film | t < s/2: ρ = R_s·t | Ω·cm |
| ρ (özdirenç) — kalın numune | t ≥ s/2: ρ = 2π·s·R (bulk formülü) | Ω·cm |
| σ (iletkenlik) | σ = 1/ρ | S/cm |
Birim dönüşümü: inç→cm ×2.54; nm→cm ×1e-7. Rejim alanı thin / bulk / sheet_only olarak raporlanır.
Sürülen akım dizisine karşı ölçülen 4-telli gerilim çizilir; bu doğrunun eğimi direnci verir (gerilim probundan akım geçmediği için kablo/temas direnci ölçüm dışıdır).
- Adım: V–I noktalarına bir doğru oturtulur; eğim R = dV/dI alınır.
- Adım: kolinear geometrinin geometrik faktörü uygulanır:
R_s = (π/ln2)·R ≈ 4.5324·R(Ω/sq). - Sonuç: kalınlık biliniyorsa, ince rejimde (t < s/2) özdirenç
ρ = R_s·t, iletkenlikσ = 1/ρ.
Grafik: R okumaları (V-I noktaları). Arayüzde ayrıca prob dizilimini gösteren bir görsel panel bulunur.
C.2 Van der Pauw / Hall
Düzensiz şekilli küçük bir numunenin direncini, kenarına yerleştirilen dört kontaktan farklı kombinasyonlarla ölçer. Üstüne bir manyetik alan eklenirse (Hall etkisi), içindeki yük taşıyıcılarının tipi, sayısı ve hareketliliği de ortaya çıkar. Bir nehirde yüzen nesnelere bakıp suyun ne yöne, ne hızda ve ne yoğunlukta aktığını anlamak gibidir.
Fiziksel arka plan: Van der Pauw yönteminde keyfi şekilli ince numunenin kenarındaki dört kontaktan iki yönde direnç (Ra, Rb) ölçülür; bunlar van der Pauw bağıntısına konunca numune şeklinden bağımsız tabaka direnci (R_s) çıkar. Hall ölçümünde manyetik alan (B) altında Lorentz kuvveti taşıyıcıları yana iter ve enine bir Hall gerilimi (V_H) doğar; V_H'nin işareti taşıyıcı tipini (N/P), büyüklüğü taşıyıcı yoğunluğunu verir. R_s ile birleşince mobilite (µ) bulunur. Bu yüzden Ra≈Rb olması (yüksek homojenlik) ve net bir V_H işareti, ölçümün güvenilirliğinin ilk göstergesidir.
- Neden yapilir: Malzemenin iletkenliğini ve içindeki taşıyıcıların tip/yoğunluk/hareketliliğini birlikte belirlemek için.
- Ne ogretir / ne olcer: R_s/ρ = tabaka direnci/özdirenç; taşıyıcı tipi = R_H işareti (R_H<0 N-Type, >0 P-Type); n = 1/(|R_H|·q) = taşıyıcı yoğunluğu; µ = |R_H|/ρ = mobilite; n_s = tabaka taşıyıcı yoğunluğu; Homojenlik = Ra≈Rb tutarlılık kontrolü.
- Tipik degerler ve yorumu: Homojenlik >%95 (Ra≈Rb) iyi sayılır; IGZO gibi filmlerde µ ~1–20 cm²/Vs, kristal Si'de yüzlerce, GaAs'ta binlerce cm²/Vs; taşıyıcı yoğunluğu katkıya göre 10¹⁵–10²⁰ cm⁻³ arası değişir.
- Sik hata / dikkat: Kalınlığı (thickness_nm) yanlış girmek (ρ ve n ölçeği bozulur); B kalibrasyonunu/duty değerini ihmal etmek (R_H ve µ kayar); kontakların ohmik olmadığını fark etmemek; homojenlik ≪%95 iken VdP varsayımının çöktüğünü göz ardı etmek.
- Nerede kullanilir: Yeni yarıiletken malzeme araştırması ve katkılama (doping) doğrulaması.
Modül: measure.vdp · Gezinme: Van der Pauw / Hall
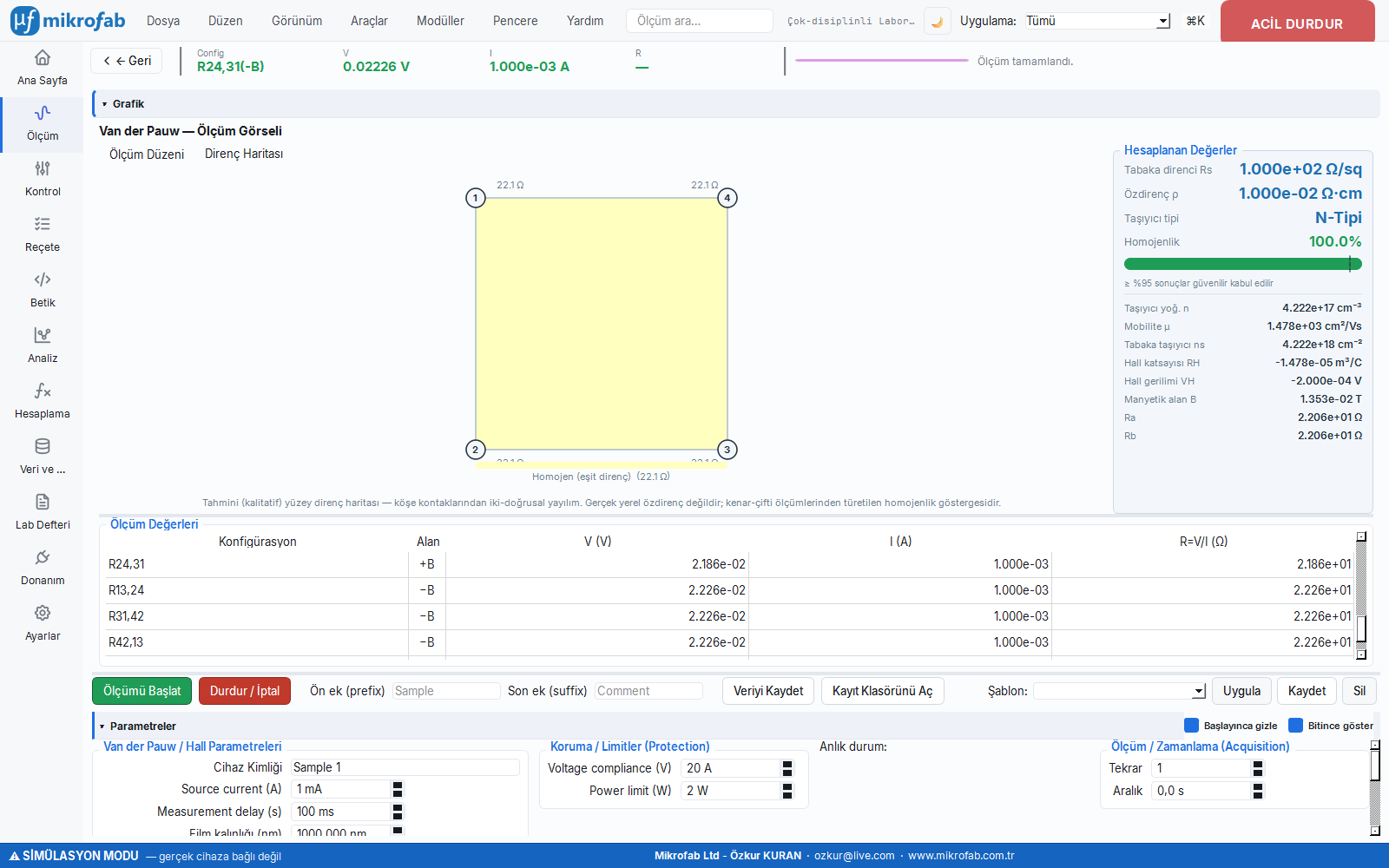
Amaç: Van der Pauw yöntemiyle keyfi şekilli ince numunenin tabaka direnci ve özdirencini, isteğe bağlı olarak Hall ölçümüyle taşıyıcı tipi/yoğunluğu ve mobilitesini ölçer. Tek SMU akım kaynağı modunda çalışır; 16-rölelik anahtar matris kartında 8 kontak konfigürasyonu sırayla seçilir.
Ne ölçer: Her röle konfigürasyonunda sabit akım sürülür, gerilim okunur (R = V/I). 8 konfig → Ra (ilk 4) ve Rb (son 4). Hall açıkken +B/−B alanında 4'er konfig daha ölçülür.
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
source_current | A | Sürülen sabit akım | 1e-3 |
voltage_limit | V | Gerilim compliance | 5.0 |
thickness_nm | nm | Film kalınlığı (özdirenç/Hall için) | 1000.0 |
magnetic_field_duty | 0..255 | Anahtar matris PWM görev çevrimi (Hall) | 150 |
enable_hall | — | Hall ölçümü (+B/−B) yapılsın mı | True |
per_point_delay_s | s | Röle/akım ayarı sonrası ölçüm gecikmesi | 0.1 |
mock_inhomogeneous | — | (Yalnız mock) inhomojen film benzetimi | False |
Hesaplanan metrikler:
| Metrik | Formül | Birim |
|---|---|---|
| Ra / Rb | İlgili 4 konfig ortalaması | Ω |
| Homojenlik | (1 − |Ra−Rb|/ort)·100 | % |
| R_s (tabaka direnci) | R_s = (π/ln2)·((Ra+Rb)/2) | Ω/sq |
| ρ (özdirenç) | ρ = R_s·t | Ω·cm |
| V_H (Hall gerilimi) | Eşleşen +B/−B konfiglerinin (V₊−V₋)/2 ortalaması | V |
| R_H (Hall katsayısı) | R_H = V_H·t / (I·B) | m³/C |
| n (taşıyıcı yoğ.) | n = 1/(|R_H|·q) (×1e-6 → cm⁻³) | cm⁻³ |
| Taşıyıcı tipi | R_H < 0 → N-Type, R_H > 0 → P-Type | — |
| µ (mobilite) | µ = |R_H|/ρ_SI · 1e4 | cm²/Vs |
| n_s (tabaka taşıyıcı yoğ.) | n_s = n·t·1e7 | cm⁻² |
Manyetik alan kalibrasyonu: B = (duty/255)·0.023 T (duty=255 ≈ 23 mT).
18F12F11F5F, +B<duty>) kullanıcının 16-rölelik van der Pauw kartına özeldir ve birebir korunmuştur. Homojenlik %95 altındaysa uyarı verilir.Burada tek bir grafik eğimi yerine, farklı kontak konfigürasyonlarında ölçülen dirençler ve Hall gerilimi van der Pauw bağıntılarına konur (formül-temelli çıkarım).
- Adım: iki yöndeki direnç ortalamaları (Ra, Rb) alınır →
R_s = (π/ln2)·((Ra+Rb)/2), özdirençρ = R_s·t. - Adım: Hall gerilimi
V_H = (V₊−V₋)/2ölçülür; Hall katsayısıR_H = V_H·t/(I·B)(işareti taşıyıcı tipini verir: R_H<0 N-Type). - Sonuç: taşıyıcı yoğunluğu
n = 1/(|R_H|·q), mobiliteµ = |R_H|/ρ.
Grafik: VDP haritası (konfig-bazlı dirençler + yüzey direnç haritası).
mock_inhomogeneous=True ise kontak ağırlıklarıyla konfiglar arası direnç değiştirilir (homojenlik <%100, anlamlı yüzey gradyanı).C.3 Kelvin 4-Telli Direnç
Çok küçük dirençleri doğru ölçmenin yoludur. Akımı taşıyan teller ile gerilimi okuyan teller ayrılır; böylece kabloların ve temasların direnci sonuca eklenmez. İsteğe bağlı 2-telli ölçümle kıyaslayarak temas direncini tek başına çıkarabilirsiniz. Bir paketin net ağırlığını öğrenmek için ambalajın ağırlığını ayrıca tartıp çıkarmak gibidir.
Fiziksel arka plan: Akım taşıyan (Force) ve gerilim okuyan (Sense) teller ayrıdır; Sense telinden neredeyse hiç akım geçmediği için kablo/temas üzerindeki IR düşüşleri ölçüme girmez ve okunan V/I gerçek cihaz direncini verir. 2-telli ölçüm ise temas+kablo direncini de içerir; iki ölçümün farkı doğrudan temas direncini (R_contact) verir. Bu yüzden 4-telli eğri daha "dik" (daha düşük R) çıkarken 2-telli eğri her zaman ya aynı ya daha yatık olur; aradaki fark kontak kalitesinin ölçüsüdür.
- Neden yapilir: Gerçek cihaz/seri direncini, kablo ve temas etkilerinden arındırarak ölçmek için.
- Ne ogretir / ne olcer: R_4wire = gerçek cihaz/seri direnci (kablo+temas hariç); R_2wire = toplam direnç (temas dahil); R_contact = R_2wire − R_4wire = tek başına temas direnci; V_F@1mA = referans çalışma gerilimi.
- Tipik degerler ve yorumu: İyi bir ohmik kontakta R_contact ≪ R_device (mΩ–Ω); R_contact, R_4wire'a yaklaşıyorsa kontak sorunludur; yüksek NPLC düşük-direnç ölçümündeki gürültüyü bastırır.
- Sik hata / dikkat: Force/Sense uçlarını yanlış noktaya bağlayıp 4-telliyi etkisiz kılmak; düşük direnci düşük NPLC'de ölçüp gürültüye boğmak; 2-telli karşılaştırmayı (compare_2wire) kapatıp R_contact'i hiç görememek.
- Nerede kullanilir: Düşük dirençli kontak/iletken karakterizasyonu ve temas kalitesi denetimi.
Modül: measure.kelvin · Gezinme: Kelvin 4-Telli Direnç
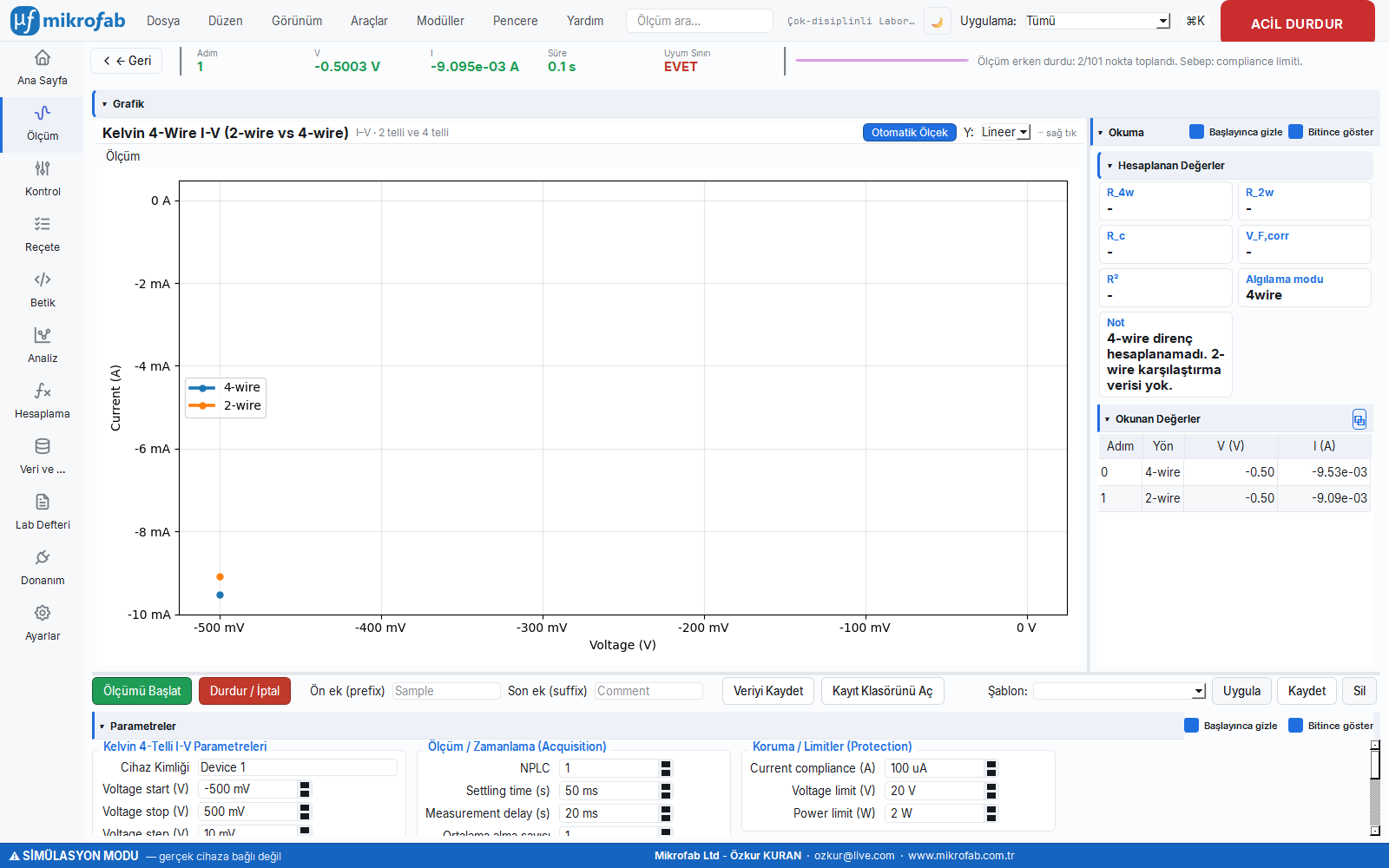
Amaç: 4-telli (Force/Sense) ölçümle gerçek cihaz/seri direncini, kablo ve temas direncini dışlayarak ölçer. İsteğe bağlı 2-telli karşılaştırmayla temas direnci çıkarılır.
Ne ölçer: Gerilim taramasına karşı akım; her modda R = dV/dI.
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
voltage_start / voltage_stop / voltage_step | V | I-V taraması | -0.5 / 0.5 / 0.01 |
current_compliance | A | Akım sınırı | 0.1 |
nplc | — | Düşük-akım hassasiyeti için yüksek NPLC | 10.0 |
settling_time_s | s | Yerleşme süresi | 0.1 |
sense_mode | — | 2wire / 4wire | 4wire |
compare_2wire | — | 2-telli karşılaştırma taraması da yap | True |
Hesaplanan metrikler:
| Metrik | Formül | Birim |
|---|---|---|
| R_4wire | 4-telli V-I fit eğimi (gerçek seri direnç) | Ω |
| R_2wire | 2-telli toplam direnç | Ω |
| R_contact | R_2wire − R_4wire | Ω |
| V_F@1mA | 4-telli eğride 1 mA'daki gerilim (interp) | V |
| Fit R² (4-wire) | Doğrusal fit kalitesi | — |
4-telli ve (varsa) 2-telli V–I taramalarının her birine ayrı bir doğru oturtulur; iki eğimden okunan dirençlerin farkı temas direncini verir.
- Adım: 4-telli V–I noktalarının eğimi → gerçek seri direnç
R_4wire = dV/dI(kablo/temas hariç). - Adım: 2-telli taramanın eğimi →
R_2wire(temas dahil toplam direnç). - Sonuç: temas direnci iki ölçümün farkıdır:
R_contact = R_2wire − R_4wire.
Grafik: R-I.
C.4 Prob İstasyonu I-V (Probe Station I-V)
Bir prob istasyonunda iğne uçlu problar cihazın temas noktalarına dokundurulur; bu mod, anahtar matrisi üzerinden iki probu seçip basit bir gerilim-akım taraması yaparak direnci çıkarır. Bir devre kartının iki noktasına multimetre uçlarını değdirip direnç okumak gibidir; burada uçların seçimini yazılım yapar.
Fiziksel arka plan: İki prob arasında gerilim taranır ve akım okunur; ohmik bir yapıda I-V orijinden geçen bir doğrudur, eğimi iletkenliği (G = dI/dV) verir. Bu 2-telli bir ölçüm olduğundan prob/temas direnci sonuca dahildir. Eğri doğrusallıktan saparsa (bükülme) temasın ya da cihazın ohmik olmadığı anlaşılır; bu, prob istasyonunda hızlı bir "çalışıyor mu / temas iyi mi" kontrolüdür.
- Neden yapilir: Mikromanipülatörlü prob istasyonunda hızlı bir 2-telli direnç/iletkenlik ölçümü almak için.
- Ne ogretir / ne olcer: R = cihazın direnci; G = dI/dV = iletkenliği; doğrusallık (R²) = kontağın/cihazın ohmik olup olmadığının göstergesi.
- Tipik degerler ve yorumu: R² ≈1 temiz ohmik davranış; düşük R² eğrisellik/temas sorunu demektir; ölçülen R, gerçek cihaz + prob/temas direncinin toplamıdır.
- Sik hata / dikkat: 2-telli olduğu için küçük dirençlerde temas payını gerçek cihaz direnci sanmak (gerekirse Kelvin'e geçin); aynı probu hem Force HI hem Force LO seçmek (doğrulama hatası); compliance'a çarpıp eğriyi kırpmak.
- Nerede kullanilir: Wafer üzerinde tekil cihaz/yapıların hızlı elektriksel kontrolü.
Modül: measure.probe_iv · Gezinme: Prob İstasyonu I-V
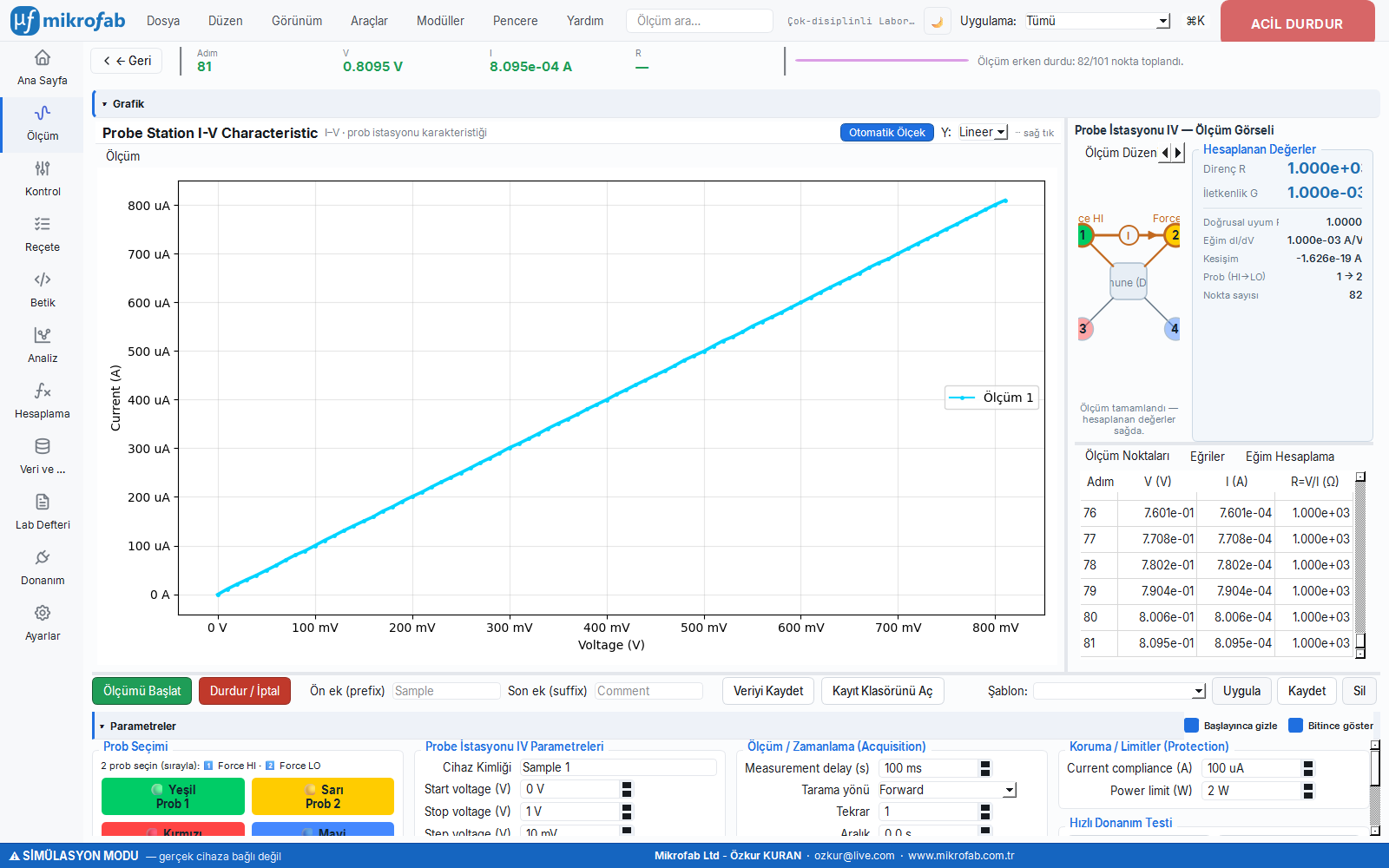
Amaç: Anahtar matris kartı 4 probdan 2'sini (Force HI / Force LO) seçer; SMU gerilim kaynağı modunda 2-telli bir I-V taraması yapar ve direnci çıkarır. Mikromanipülatörlü prob istasyonu kullanımı için uygundur.
Ne ölçer: Gerilim taramasına karşı akım; G = dI/dV, R = 1/G.
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
start_voltage / stop_voltage / step_voltage | V | I-V taraması | 0.0 / 1.0 / 0.01 |
current_compliance | A | Akım sınırı | 0.1 |
delay_s | s | Nokta başına bekleme | 0.1 |
force_hi_probe | 1..4 | Force HI probu | 1 |
force_lo_probe | 1..4 | Force LO probu | 2 |
Hesaplanan metrikler:
| Metrik | Formül | Birim |
|---|---|---|
| G (iletkenlik) | I = eğim·V + kesim; eğim = dI/dV | S |
| R (direnç) | R = 1/G | Ω |
| Eğim / kesim / R² | Doğrusal fit | A/V · A · — |
Grafik: I-V. Arayüzde prob→pin haritasını gösteren bir görsel panel bulunur.
D. Güvenilirlik Modülleri
D.1 Bias Stres / Geçici (Bias Stress / Transient)
Cihaza sabit bir gerilim/akım uygular ve akımının zamanla nasıl "kaydığını" (drift) izler. İyi bir cihazda akım sabit kalmalı; kayma varsa cihaz yorulur. Bir yayı belli bir gerilimde tutup zamanla gevşeyip gevşemediğini gözlemlemek gibidir.
Fiziksel arka plan: Sabit kutuplama altında yük yavaşça yalıtkan/arayüze tuzaklanır (ve öz-ısınma katkı yapar); bu, savak akımının zamanla kaymasına — genelde yavaş bir azalış veya artışa — yol açar. I_DS(t) eğrisinin biçimi tuzaklanma kinetiğini yansıtır: kararlı bir cihazda çizgi düz kalır, kayma ne kadar büyük ve sürekliyse cihaz o kadar kararsızdır. Bu, eşik kaymasının zaman içindeki ham görünümüdür.
- Neden yapilir: Cihazın sürekli çalışma altında ne kadar kararlı kaldığını görmek için.
- Ne ogretir / ne olcer: I_DS(t) drift miktarı ve yönü = kararlılık ölçüsü; akım modunda gerekli gerilimin kayması dolaylı olarak eşik kaymasını ima eder.
- Tipik degerler ve yorumu: Test süresi boyunca birkaç %'nin altında drift kararlı sayılır; onlarca %'lik kayma belirgin tuzaklanma/bozulma işaretidir.
- Sik hata / dikkat: Test süresini (total_duration_s) tuzak zaman sabitlerine göre çok kısa tutup driftı kaçırmak; örnekleme aralığını gereğinden kaba bırakmak; öz-ısınma ile tuzaklanmayı ayırmak için darbeli ölçümle desteklememek.
- Nerede kullanilir: Temel güvenilirlik/kararlılık taraması ve hızlı eleme testleri.
Modül: measure.bias_stress · Gezinme: Bias Stres / Geçici
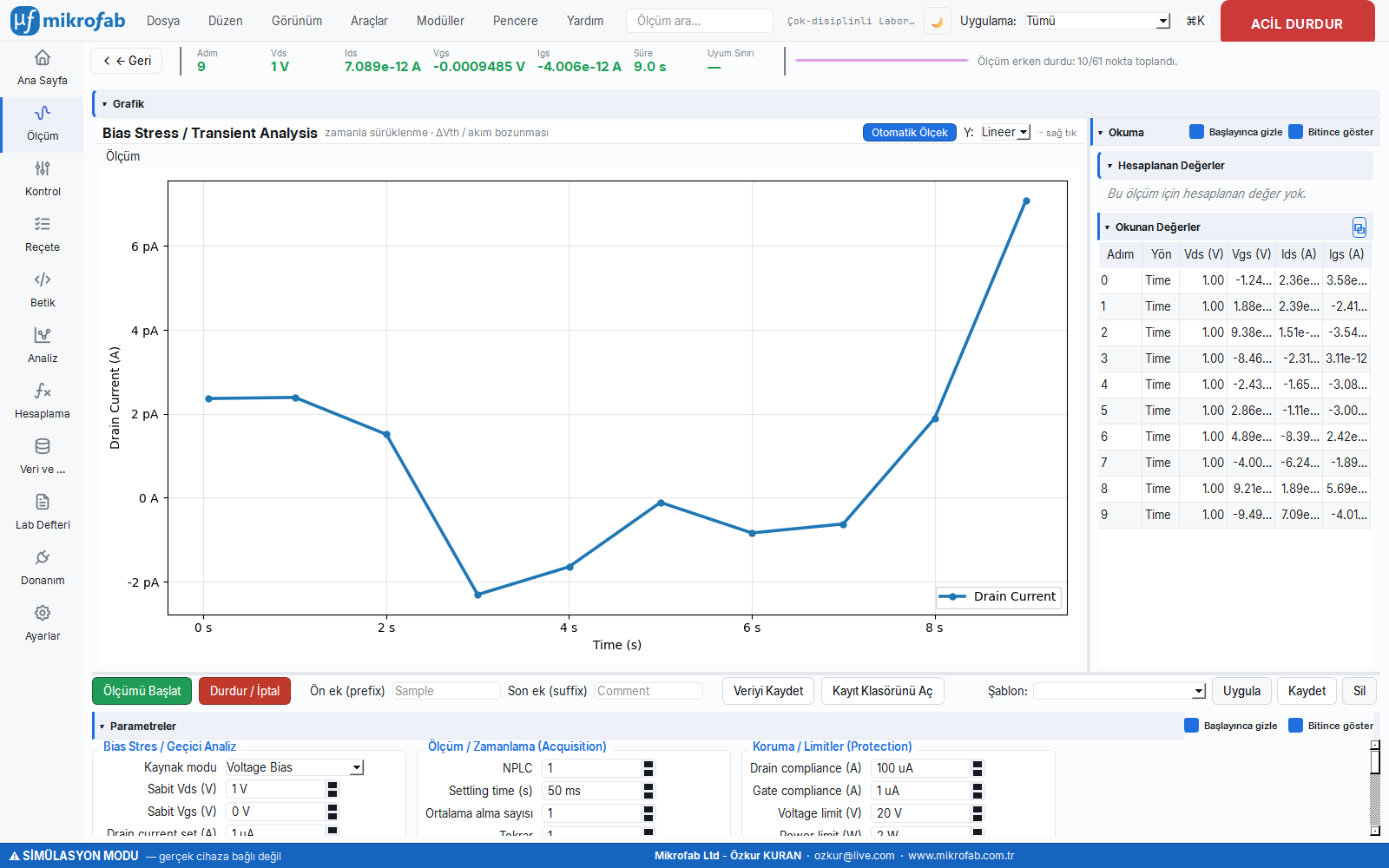
Amaç: Sabit bir kutuplama (gerilim veya akım) altında savak akımının zaman içindeki kaymasını (drift) kaydeder. Temel güvenilirlik/kararlılık testidir.
Ne ölçer: Sabit aralıklarla I_DS(t) ve I_GS(t) zaman serisi.
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
source_mode | — | Voltage Bias / Current Bias | Voltage Bias |
fixed_vds / fixed_vgs | V | Sabit savak/kapı gerilimleri | 1.0 / 0.0 |
drain_current_set | A | (Akım modunda) sabit savak akımı | 1e-6 |
total_duration_s | s | Toplam stres süresi | 60.0 |
sample_interval_s | s | Örnekleme aralığı | 1.0 |
plot_quantity | — | Grafiklenecek büyüklük | Drain Current |
Grafik: Id-t.
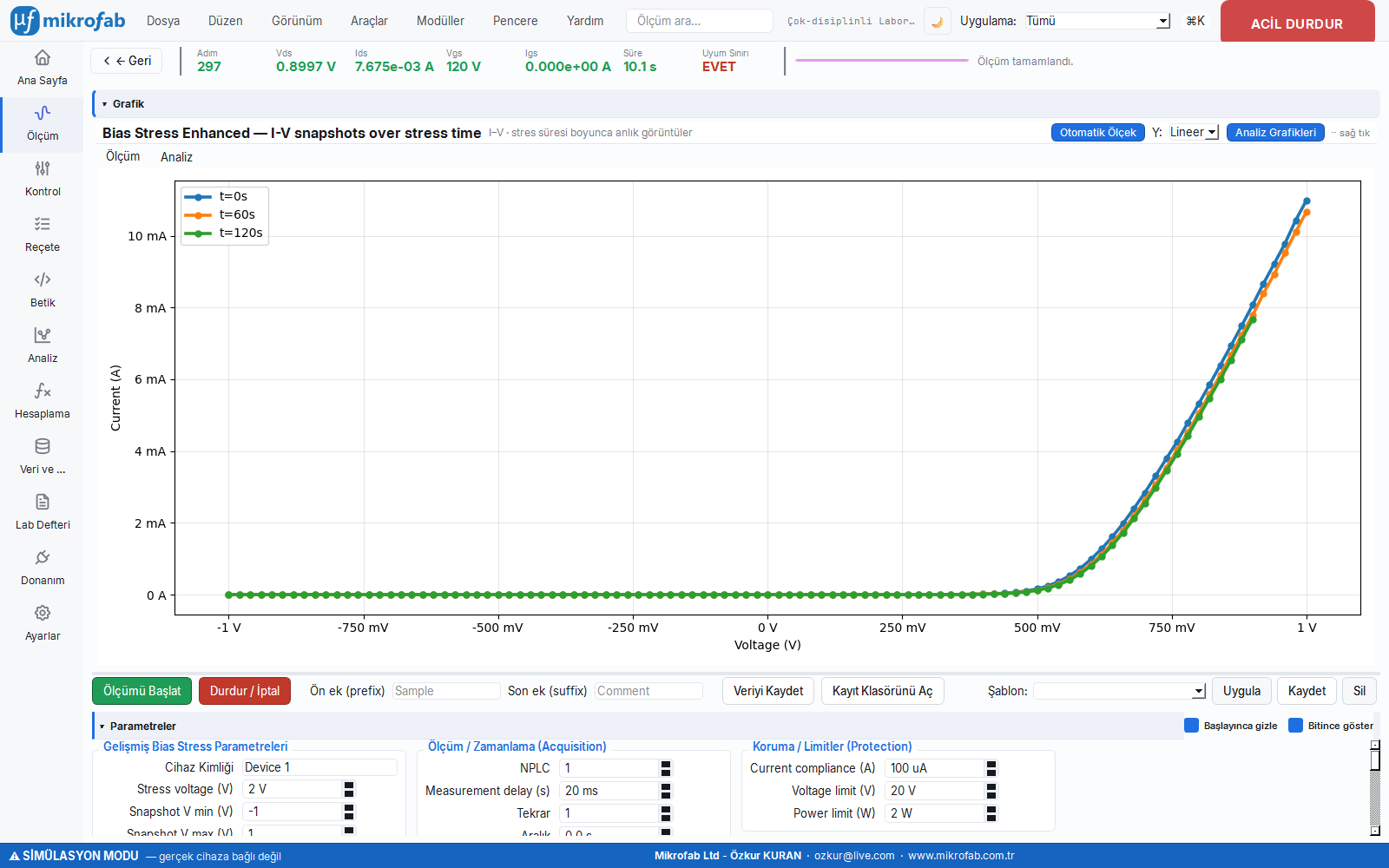
D.2 Bias Stres (Gelişmiş) (Bias Stress Enhanced)
Önceki testin "tanı koyan" sürümüdür: stres sürerken belirli aralıklarla hızlı I-V fotoğrafları (snapshot) çeker, her birinden eşiği çıkarır ve eşik kaymasını zamana karşı modelleyerek cihazın ne zaman "arızalanacağını" öngörür. Bir lastiğin aşınmasını düzenli ölçüp kaç km sonra biteceğini hesaplamak gibidir.
Fiziksel arka plan: Stres altında eşik gerilimi, tuzakların dolmasıyla zamanın güç-yasası (veya gerilmiş-üstel) biçiminde kayar. Periyodik I-V fotoğrafları V_th(t)'yi izler; ΔV_th(t)=A·t^p eğrisi fit edilip bir arıza ölçütüne (vth_fail) ekstrapole edilerek ortalama arıza süresi (MTTF) öngörülür. Üs p, tuzaklanmanın mekanizmasını (yayılım- veya yakalama-sınırlı) ima eder; bu yüzden tek bir snapshot değil, snapshot dizisinin zamanla eğilimi anlamlıdır.
- Neden yapilir: Eşik kaymasının zaman seyrini modelleyip cihazın ömrünü öngörmek için.
- Ne ogretir / ne olcer: ΔV_th(t) = eşik kayma seyri; p = stres üssü (mekanizma göstergesi); A = kayma katsayısı; MTTF = ömür/arıza süresi öngörüsü; drift hızı = V_th–log₁₀(t) eğimi (V/dekad).
- Tipik degerler ve yorumu: p ~0.2–0.6 tuzaklanma-sınırlı süreçlerde tipiktir (mock'ta p=0.5); MTTF ne kadar büyükse o kadar dayanıklı; |ΔV_th| arıza eşiğine (örn 0.1 V) ne kadar yavaş ulaşırsa cihaz o kadar kararlıdır.
- Sik hata / dikkat: Aktivasyon enerjisi E_a'yı tek sıcaklıkta beklemek (yalnız çok-sıcaklıklı stresle çıkar, tek T'de N/A döner); fiti log-log'da yapıp küçük-t gürültüsünü şişirmek (lineer uzayda fit edilmelidir); çok kısa toplam stresten uzun-vade MTTF'yi aşırı ekstrapole etmek.
- Nerede kullanilir: Ömür/güvenilirlik nitelendirmesi ve süreç (proses) iyileştirme karşılaştırmaları.
Modül: measure.bias_stress_enh · Gezinme: Bias Stres (Gelişmiş)
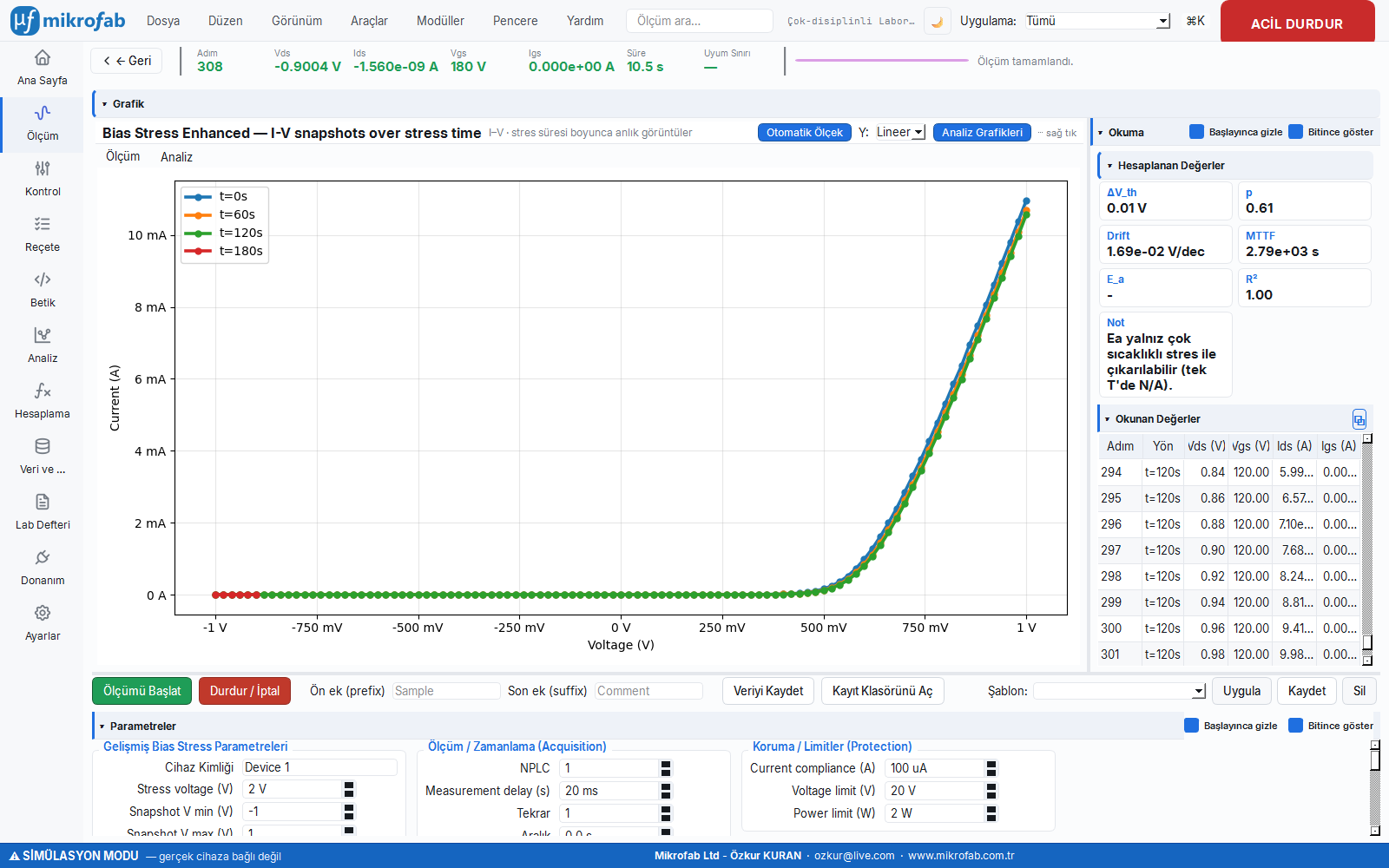
Amaç: Stres uygulanırken belirli aralıklarla hızlı I-V snapshot alır; her snapshot'tan V_th(t), n(t), I0(t) çıkarır. Eşik kaymasına güç-yasası fit edilip arıza süresi (MTTF) ekstrapole edilir.
Ne ölçer: Zamana karşı bir dizi I-V snapshot; her birinden V_th/n/I0.
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
stress_voltage | V | Uygulanan stres gerilimi | 2.0 |
snapshot_v_min / snapshot_v_max / snapshot_v_step | V | Snapshot I-V aralığı | -1.0 / 1.0 / 0.02 |
meas_interval_s | s | Snapshot aralığı | 60.0 |
total_stress_s | s | Toplam stres süresi | 3600.0 |
vth_fail_v | V | MTTF arıza kriteri (ΔV_th) | 0.1 |
fit_v_min / fit_v_max | V | İdeallik fit aralığı | 0.10 / 0.40 |
current_compliance | A | Akım sınırı | 1e-2 |
Hesaplanan metrikler:
| Metrik | Formül | Birim |
|---|---|---|
| ΔV_th,toplam | Güç-yasası modeline göre A·t_son^p | V |
| p (stres üssü) | ΔV_th(t) = A·t^p güç-yasası fitinden | — |
| MTTF | MTTF = (vth_fail/A)^(1/p) | s |
| Drift hızı | V_th–log₁₀(t) eğimi | V/dekad |
| A (katsayı), Fit R² | Güç-yasası fit parametreleri | V/s^p · — |
Grafik: Id-t ve Vth-t.
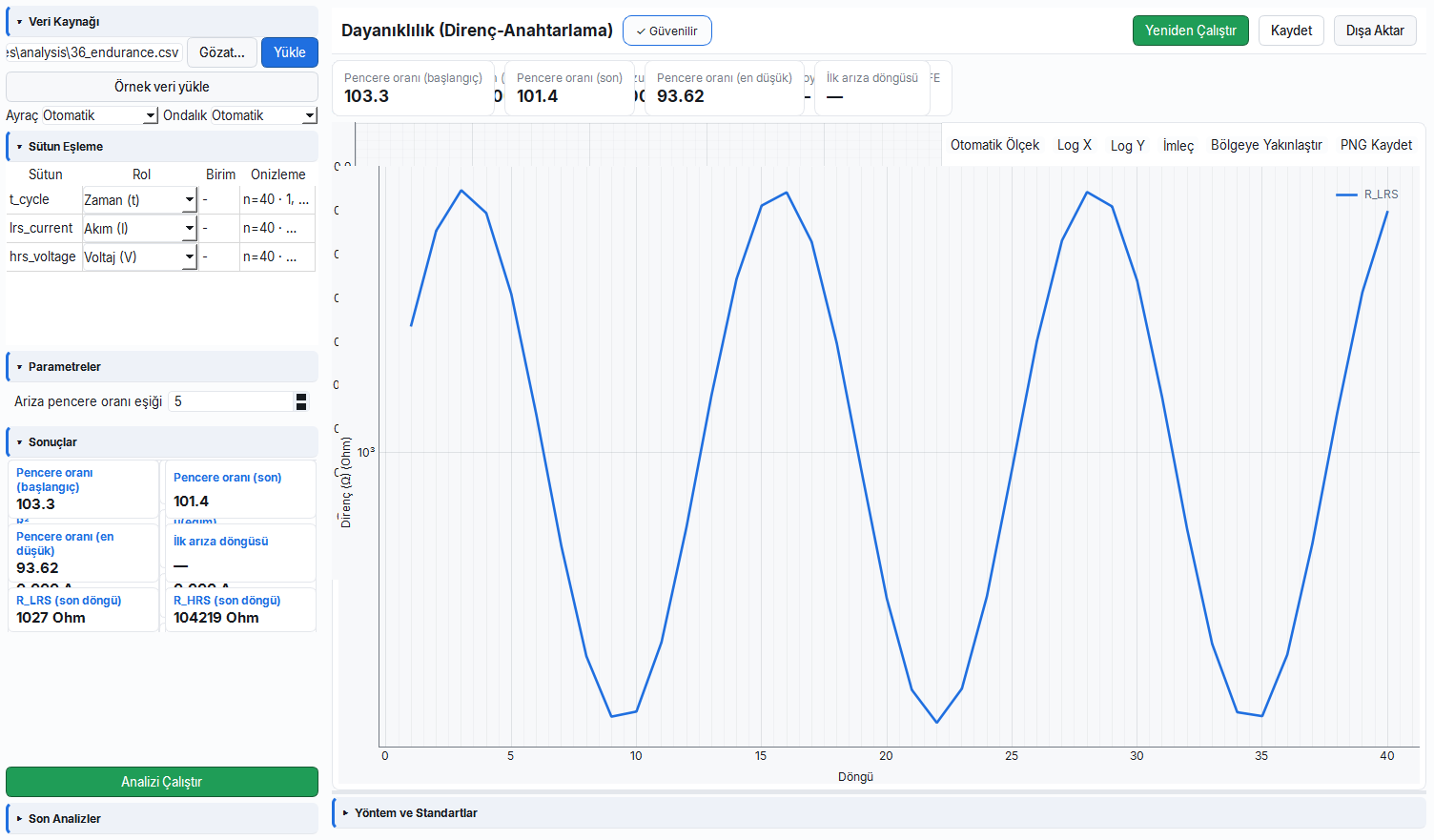
0.01·√(t/60) V kayar (p=0.5 güç-yasası); uzun gerçek bekleme atlanır, mantıksal zaman ızgarası kullanılır.D.3 Dayanıklılık — SET/RESET Döngü (Endurance)
Direnç-anahtarlamalı bellekler (RRAM/memristör) "düşük dirençli" ve "yüksek dirençli" iki durum arasında gidip gelerek bilgi saklar. Bu test, cihaza binlerce kez yaz-sil yaptırır ve iki durumun birbirinden ne kadar süre ayrı kaldığını izler. Bir ışık anahtarını binlerce kez açıp kapatarak ne zaman takılmaya başladığını saymak gibidir.
Fiziksel arka plan: Direnç-anahtarlamalı bellek, SET darbesiyle içeride iletken bir filament oluşturup düşük dirence (LRS), RESET darbesiyle filamenti kopartıp yüksek dirence (HRS) geçer; her yazmadan sonra durumu bozmayan küçük bir okuma direnci ölçülür. Çok sayıda döngüde filament yorulduğunda iki durum birbirine yaklaşır (R_HRS/R_LRS penceresi kapanır) ve dayanıklılık arızası oluşur. Yarı-log grafikte LRS ve HRS başta iki ayrı plato çizer; bu platolar birbirine yaklaşmaya başladığı döngü, ömrün sonuna işarettir.
- Neden yapilir: Belleğin kaç yaz-sil döngüsüne dayandığını ve ne zaman bozulduğunu ölçmek için.
- Ne ogretir / ne olcer: R_LRS / R_HRS = düşük/yüksek direnç durumları; pencere oranı = R_HRS/R_LRS = iki durumun okunabilirlik payı; ilk-arıza döngüsü = pencerenin eşik altına düştüğü döngü (dayanıklılık sınırı).
- Tipik degerler ve yorumu: Pencere ≳10 rahat okunur (mock'ta LRS ~1.5 kΩ, HRS ~5 MΩ → çok geniş pencere); pencere failure_window_ratio'nun (örn 5) altına düşünce "arıza" sayılır; iyi bir RRAM 10⁶–10⁹ döngü dayanabilir.
- Sik hata / dikkat: Okuma gerilimini (read_voltage_v) yüksek seçip durumu okurken bozmak (read-disturb); SET/RESET compliance'ını yanlış ayarlayıp filamenti aşırı/eksik oluşturmak; pencereyi mutlak dirençle değil R_HRS/R_LRS oranıyla değerlendirmek gerektiğini atlamak.
- Nerede kullanilir: Yeni bellek/sinaptik cihaz araştırması ve dayanıklılık nitelendirmesi.
Modül: measure.endurance · Gezinme: Dayanıklılık (SET/RESET Döngü)
Amaç: Direnç-anahtarlamalı bellek (RRAM / memristör / sinaptik transistör) dayanıklılık testi. Her döngüde savağa bir SET ve bir RESET yazma darbesi uygulanır; her yazmadan sonra durumu bozmayan küçük bir okuma darbesiyle direnç okunur. Kapı sabit tutulur (gate-tunable: farklı V_G anahtarlama penceresini kaydırır).
Ne ölçer: Döngü başına iki direnç okuması — SET sonrası → R_LRS (düşük direnç durumu), RESET sonrası → R_HRS (yüksek direnç durumu). R = |V/I|.
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
n_cycles | — | Toplam döngü sayısı | 100 |
set_voltage_v / reset_voltage_v | V | SET / RESET yazma darbeleri | 2.0 / -2.0 |
write_pulse_width_s | s | Yazma darbe süresi | 0.2 |
read_voltage_v | V | Okuma darbesi (durumu bozmayan küçük gerilim) | 0.2 |
read_pulse_width_s | s | Okuma yerleşme/darbe süresi | 0.01 |
read_samples | — | Okuma başına örnek (ortalama) | 5 |
gate_voltage_v | V | Sabit kapı biası (gate-tunable) | 0.0 |
inter_pulse_delay_s | s | Darbeler arası ek gecikme | 0.0 |
failure_window_ratio | — | HRS/LRS bu oranın altına düşünce "arıza" | 5.0 |
current_compliance | A | Savak/kapı akım sınırı | 1e-2 |
Hesaplanan metrikler:
| Metrik | Formül | Birim |
|---|---|---|
| R_LRS / R_HRS (ilk & son) | SET/RESET sonrası R = |V/I| | Ω |
| Pencere oranı | window = R_HRS/R_LRS (ilk/son/minimum) | — |
| İlk-arıza döngüsü | Pencere failure_window_ratio'nun altına düştüğü ilk döngü | — |
| Tamamlanan döngü | Toplanan döngü sayısı | — |
Grafik: R-cycle (yarı-log; döngüye karşı R_LRS / R_HRS).
E. Sıcaklık ve Haritalama Modülleri
E.1 Sıcaklık-Bağımlı I-V (T-IV)
Aynı I-V ölçümünü bir dizi farklı sıcaklıkta tekrarlar. Yarıiletkenlerin davranışı sıcaklıkla değiştiğinden, bu değişimi izleyerek cihazın içindeki fiziksel mekanizmaları (bariyerler, aktivasyon enerjisi) ayıklayabiliriz. Bir reçeteyi farklı fırın sıcaklıklarında deneyip pişmenin ardındaki kuralı çıkarmak gibidir.
Fiziksel arka plan: Termiyonik emisyon akımı sıcaklığa çok güçlü bağlıdır (I0 ∝ T²·exp(−qΦ_B/kT)). Birkaç sıcaklıkta I-V alıp Richardson grafiğini (ln(I0/T²)'ye karşı 1/T) çizmek, eğimden bariyer yüksekliğini (Φ_B), kesimden etkin Richardson sabitini (A**) verir. ln(I0)–1/T eğiminden aktivasyon enerjisi (E_a) çıkar. Renk-kodlu I-V ailesinin sıcaklıkla düzenli açılması (yüksek T'de daha çok akım) ve Richardson grafiğinin düz bir doğru olması, iletim mekanizmasının gerçekten termiyonik emisyon olduğunu doğrular.
- Neden yapilir: İletimin sıcaklığa bağlılığından temel fiziksel büyüklükleri çıkarmak ve iletim mekanizmasını doğrulamak için.
- Ne ogretir / ne olcer: Φ_B = sıcaklıktan bağımsız "gerçek" bariyer yüksekliği; A** = etkin Richardson sabiti (malzeme/arayüz parmak izi); E_a = aktivasyon enerjisi; dn/dT = idealliğin sıcaklık eğilimi (bariyer düzgünsüzlüğü işareti).
- Tipik degerler ve yorumu: Si Schottky için Φ_B ~0.6–0.85 eV; teorik A** Si'de ~110–120 A/cm²K² (sapma düzgünsüzlüğe işaret); n'in sıcaklık düştükçe artması (dn/dT<0) bariyer inhomojenliğinin klasik belirtisidir.
- Sik hata / dikkat: Çok dar T aralığı seçip Richardson fitini zayıflatmak; setpoint'e gerçekten ulaşılmadan ölçmek (t_settle_time_s / t_tolerance_k yetersiz); her T'de aynı fit aralığını bırakıp bükülen bölgeye girmek; A** ve Φ_B'nin aktif alana duyarlı olduğunu unutmak.
- Nerede kullanilir: İletim mekanizması araştırması ve cihazın sıcaklık aralığında güvenilirliği.
Modül: measure.tiv · Gezinme: Sıcaklık-Bağımlı I-V
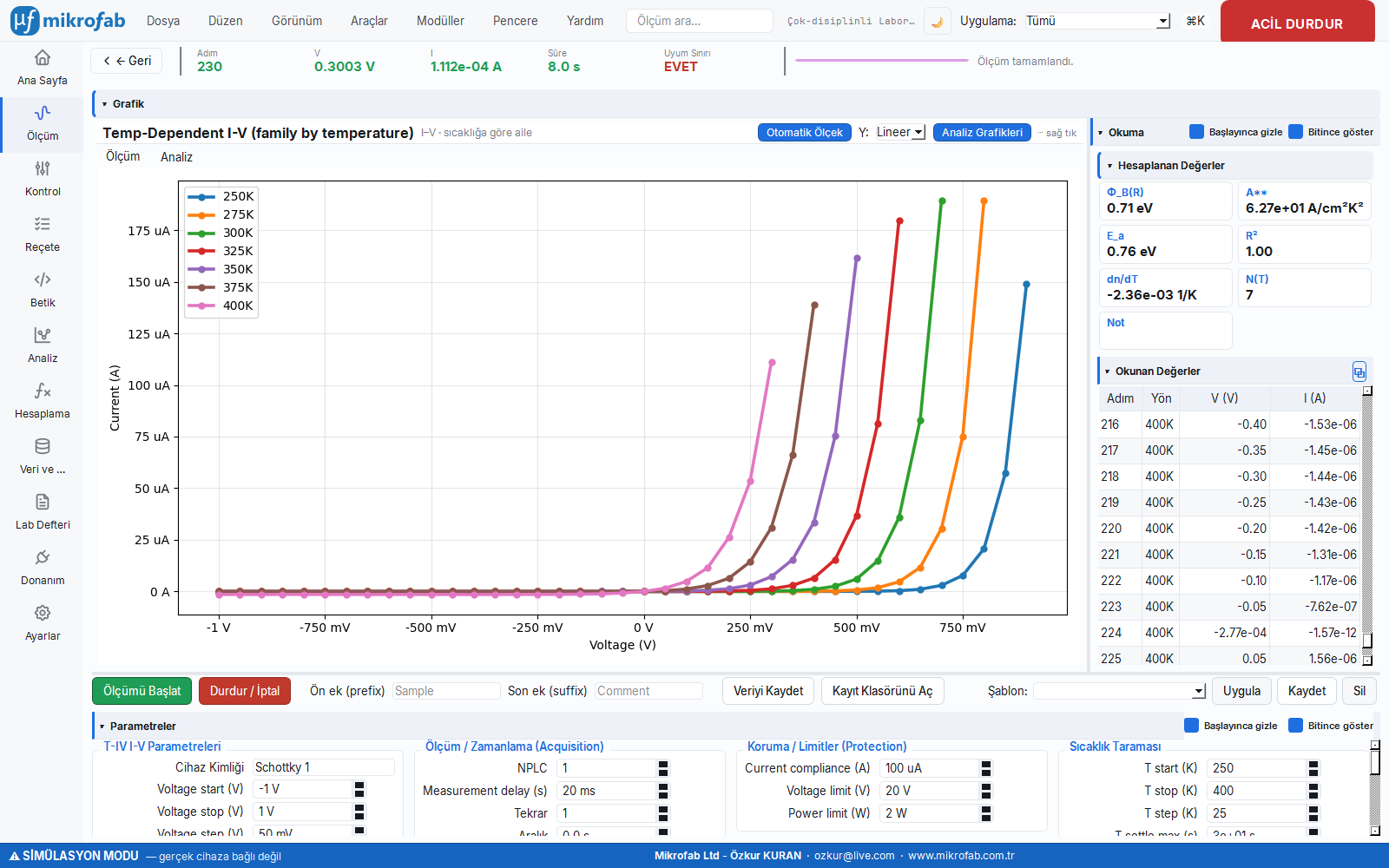
Amaç: Bir sıcaklık ayar-noktası dizisi boyunca her sıcaklıkta tam bir (Schottky) I-V taraması alır; her eğriden n(T), I0(T), Φ_B(T), R_s(T) çıkarır ve Richardson grafiğinden toplu bariyer yüksekliği ve etkin Richardson sabitini (A**) bulur. Sıcaklık denetimi soyut bir TemperatureController üzerinden yapılır (Faz 1: Simulated/Mock; Lakeshore 331/335/340 desteklenir).
Ne ölçer: Sıcaklığa göre renk-kodlu I-V ailesi; sıcaklık-çözümlü parametreler.
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
voltage_start / voltage_stop / voltage_step | V | Her T'deki I-V taraması | -1.0 / 1.0 / 0.05 |
current_compliance | A | Akım sınırı | 1e-2 |
t_start_k / t_stop_k / t_step_k | K | Sıcaklık taraması | 250 / 400 / 25 |
t_settle_time_s | s | Setpoint sonrası max stabilizasyon | 30.0 |
t_tolerance_k | K | Setpoint'e ulaşma toleransı | 2.0 |
t_controller_type | — | Simulated / Lakeshore 331/335/340 | Simulated |
t_controller_resource | — | VISA kaynağı | GPIB0::2::INSTR |
A_richardson | A/cm²K² | Richardson sabiti | 110.0 |
device_area_um2 | µm² | Aktif alan | 10000.0 |
Hesaplanan metrikler:
| Metrik | Formül | Birim |
|---|---|---|
| Φ_B (Richardson) | ln(I0/T²) = ln(A**·Area) − (qΦ_B/k)·(1/T) → Φ_B = −eğim·k·1000/q | eV |
| A** (etkin Richardson) | A** = exp(kesim)/Area | A/cm²K² |
| E_a (aktivasyon enerjisi) | ln(I0) vs 1000/T eğiminden | eV |
| dn/dT | n(T) doğrusal eğimi | 1/K |
| Sıcaklık-çözümlü diziler | n(T), I0(T), Φ_B(T), R_s(T) | — |
Grafik: I-V per T (sıcaklığa göre renk-kodlu eğri ailesi).
I0(T) = A**·T²·Area·exp(−qΦ_B/kT), Φ_B = 0.72 eV, n(T) = 1.5 + 200/T; böylece Richardson analizi Φ_B=0.72'yi ve A**'yi geri kazanır. Gerçek beklemeler atlanır.E.2 Cihaz / Wafer Haritası (Device Map)
Bir wafer üzerindeki birçok konumda aynı ölçümü tekrarlar ve sonuçları renkli bir harita olarak çizer. Böylece üretimin wafer'ın her yerinde aynı kalitede olup olmadığını tek bakışta görürsünüz. Bir tarlanın farklı köşelerinden toprak örneği alıp verimlilik haritası çıkarmak gibidir.
Fiziksel arka plan: Her konumda seçili temel ölçüm koşturulur ve çıkan parametrenin yüzey boyunca dağılımı çizilir. Dağılımdaki değişim, üretim sürecinin tekdüzesizliğini (kaplama kalınlığı, katkı, tavlama gradyanları) yansıtır; ısı haritası merkez-kenar veya sistematik eğilimleri görünür kılar. Tekdüzelik std/mean ile sayısallaştırılır (küçük = daha tekdüze). Bu bir cihaz-fiziği ölçümü değil, çok sayıda tekil ölçümün mekânsal istatistiğidir.
- Neden yapilir: Üretimin yüzey boyunca ne kadar tekdüze (uniform) olduğunu değerlendirmek için.
- Ne ogretir / ne olcer: Parametre dağılımı (mean/std/min/max); uniformity = std/mean = tekdüzelik ölçüsü; mekânsal gradyan deseni (merkez-kenar vb.).
- Tipik degerler ve yorumu: Olgun bir süreçte uniformity birkaç % (std/mean ≪0.1) iyi sayılır; büyük std/mean veya güçlü kenar gradyanı süreç sorununa işaret eder.
- Sik hata / dikkat: Çok seyrek ızgarayla gerçek gradyanı kaçırmak; tek aykırı (kötü kontaklı) konumu süreç değişimi sanmak; kullanıcı destekli kipte yanlış prob yerleşimi; base_measurement'ın her konumda aynı koşulda çalıştığından emin olmamak.
- Nerede kullanilir: Üretim/proses kalite kontrolü ve süreç tekdüzeliği analizi.
Modül: measure.device_map · Gezinme: Cihaz / Wafer Haritası
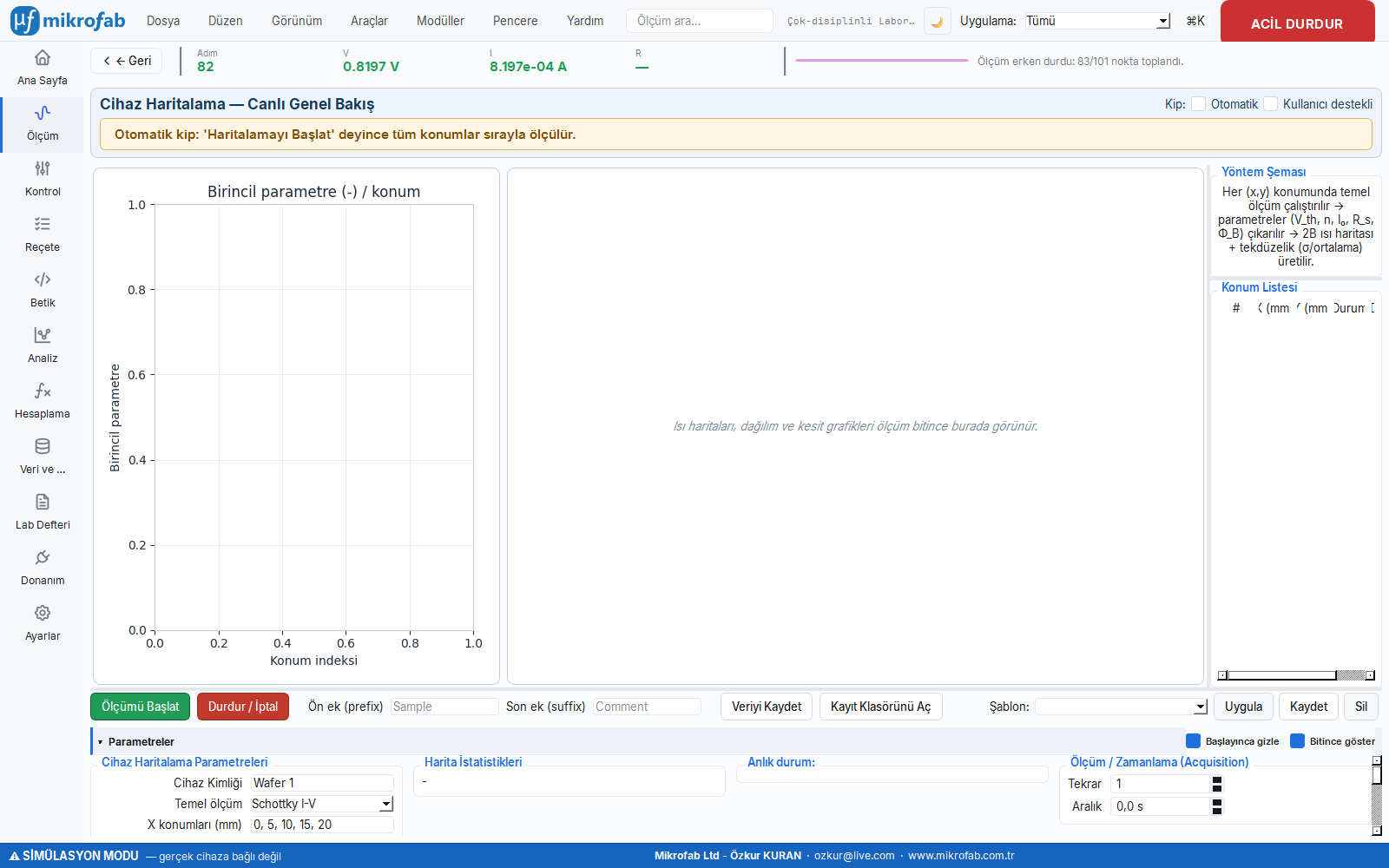
Amaç: Bir ızgara (x,y) üzerinde her konumda seçilen temel ölçümü çalıştırır ve seçilen parametreleri çıkarır; parametre başına 2B ısı haritası ve tekdüzelik (uniformity) istatistiği üretir. Wafer/numune üzerinde mekânsal tekdüzeliği değerlendirmek için kullanılır.
Ne ölçer: Her (x,y) konumunda base_measurement'tan türeyen parametreler (ör. V_th, n, I0, R_s, Φ_B).
| Parametre | Birim | Açıklama | Varsayılan |
|---|---|---|---|
base_measurement | — | Konum başına çalışan temel ölçüm | Schottky I-V |
x_positions_mm / y_positions_mm | mm (liste) | Izgara konumları | [0,5,10,15,20] |
map_params | — (liste) | Haritalanacak parametreler | [V_th, n, I_0, R_s, Phi_B] |
inter_device_delay_s | s | Otomatik kipte konumlar arası gecikme | 2.0 |
assisted | — | Kullanıcı destekli kip (her konumda onay) | False |
İki çalışma kipi: Otomatik (sıralı, inter_device_delay ile) ve Kullanıcı destekli (her konumdan önce kullanıcı probu/sahneyi konumlayıp "Bu konumu ölç" der; GUI bir kapı/Event ile devam eder).
Hesaplanan metrikler: Parametre başına mean, std, min, max ve uniformity = std/mean. Çıktıda parametre başına grids[param][iy][ix] ızgarası ve istatistik bloğu döner.
Grafik: Harita ızgarası (2B ısı haritası).
param(x,y) = nominal·(1 + 0.05·G(x,y) + küçük gürültü), burada G(x,y) ızgara merkezinde tepe yapan normalize Gauss profilidir (gerçekçi merkez-kenar tekdüzeliği). Gerçek donanımda her konumda base_measurement çalıştırılır.Özet: Modül → Grafik → Metrik Eşlemesi
Modül (id) | Gezinme | Grafik | Başlıca metrikler |
|---|---|---|---|
measure.iv | Çıkış — Vds–Vgs | Id-Vd | R_on, r_o, λ, µ_sat |
measure.transfer | Transfer | Id-Vg lin/log, gm-Vg | V_th, µFE, SS, I_on/I_off, ΔV_th |
measure.pulsed_iv | Darbeli I-V | Id-t | (öz-ısınma geçici) |
measure.qpulsed | Q-Darbeli I-V | Id-t | ΔV_th, N_t |
measure.hw_sweep | Donanım Vds–Vgs | Id-Vd | (hızlı liste taraması) |
measure.hw_tft_sweep | Donanım TFT I-V | Id-Vg | (hızlı transfer) |
measure.diode | Diyot I-V | I-V lin/log | n, I0, V_on, R_s |
measure.schottky | Schottky I-V | I-V log | Φ_B, n, R_s, J0 |
measure.rev_recovery | Ters Toparlanma | I-t | t_rr, I_rr, Q_rr, τ |
measure.four_point | Dört-Nokta | R okumaları | R_s, ρ, σ |
measure.vdp | Van der Pauw / Hall | VDP haritası | R_s, µ, n, n_s |
measure.kelvin | Kelvin 4-Telli | R-I | R_4wire, R_contact |
measure.probe_iv | Prob İstasyonu I-V | I-V | R, G |
measure.bias_stress | Bias Stres / Geçici | Id-t | (drift) |
measure.bias_stress_enh | Bias Stres (Gelişmiş) | Id-t, Vth-t | ΔV_th, p, MTTF |
measure.endurance | Dayanıklılık | R-cycle | R_LRS, R_HRS, pencere, arıza döngüsü |
measure.tiv | Sıcaklık-Bağımlı I-V | I-V per T | Φ_B, A**, E_a |
measure.device_map | Cihaz / Wafer Haritası | Harita ızgarası | bölge istatistikleri |